Honeywell DCP552 Mark II User Manual
Page 110
7-11
●
PA17 (PID computation initialize manipulated variable)
●
PA27 (PID computation initialize manipulated variable)
Under the conditions listed below, a PID computation starts using the value set in
PA17
.
• When there is a mode change from READY AUTO to RUN AUTO.
• When the controller is powered up in RUN (or HOLD, FAST, END) AUTO
mode.
• When auto-tuning ends.
Since the PV, SP and PID parameters affect a PID computation, the first
manipulated variable of a PID computation may not be the same as the value set in
PA17
and
PA27
.
●
PA31 to PA38 (event on delay groups 1 to 4, event/delay time)
• On delay can be performed on up to 4 events.
•
PA31
,
PA33
,
PA35
and
PA37
determine which events are to be processed.
• In a code event involving several event outputs, event on delay has to be set
separately for each output.
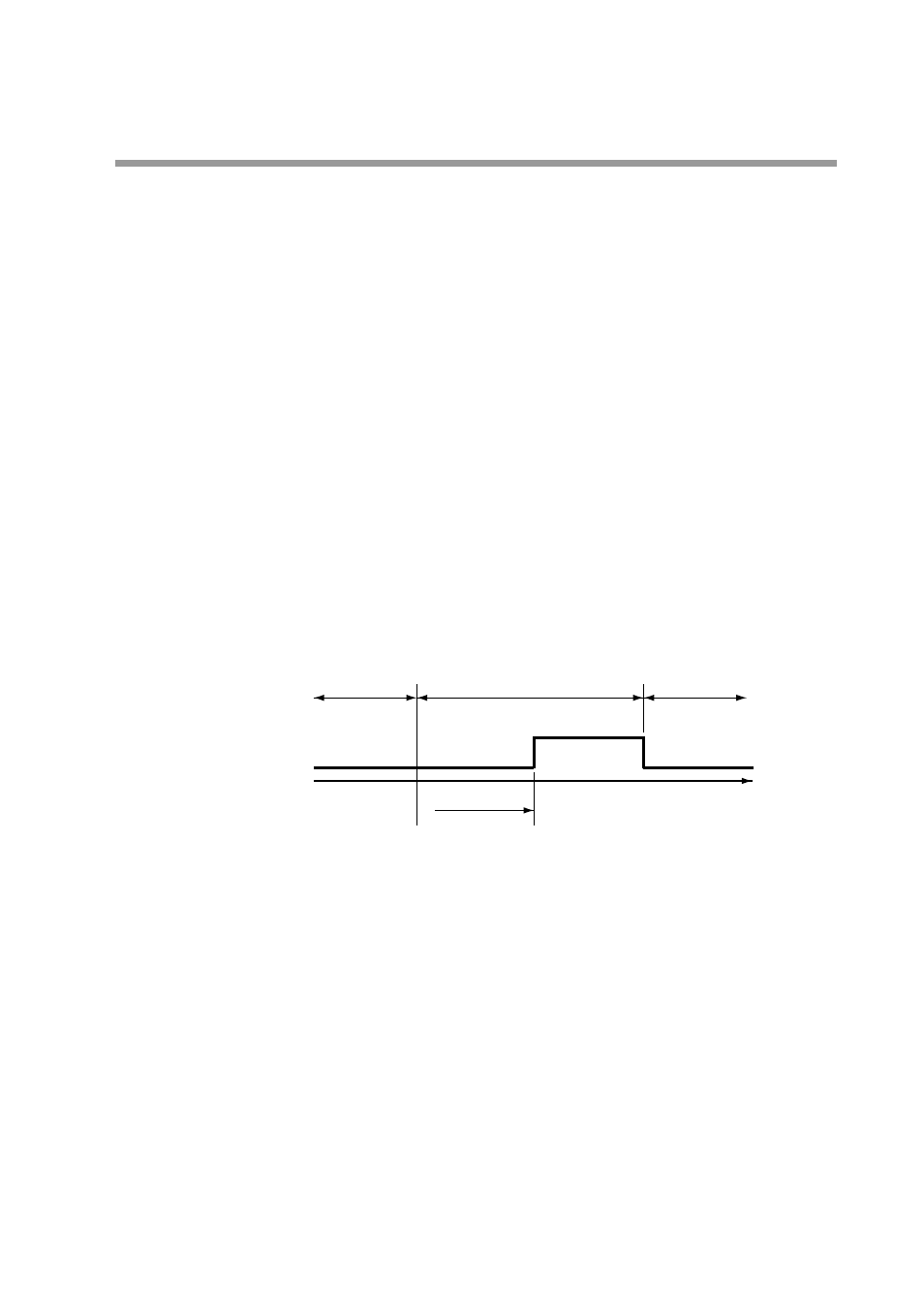
• All processes including event output standby on/off are processed before on
delay processing. When the event output ON condition remains on for longer
than the on delay time, the event output stays on.
• This is shown in the diagram below.
●
PA43 (PID computation initialize)
●
PA96 (PID computation initialize)
When SP changes abruptly due to ADV, the derivative action of a PID
computation, may cause an excessive change in the manipulated variable of the
computation.
For this reason, the initialization of a PID computation is performed to suppress an
excessive change.
But the initialization of a PID computation means that PID computation continuity
is lost which may affect operating conditions.
PA43
and
PA96
settings allow the
user to turn on or off initialization and determine its conditions.
Time
Event output turns on
Event output turns off
Event output turns off
On delay time
The requirement event turns on
The requirement event turns off
The requirement
event turns off
Chapter 7. PARAMETER SETUP