Control supervisor object - 41 (class 0x29), Services supported, Attributes supported – Yaskawa 1000 Series Drive Option - DeviceNet Technical Manual User Manual
Page 67
10 General Class Objects
YASKAWA ELECTRIC
SIEP C730600 43B 1000-Series Option SI-N3 Technical Manual
67
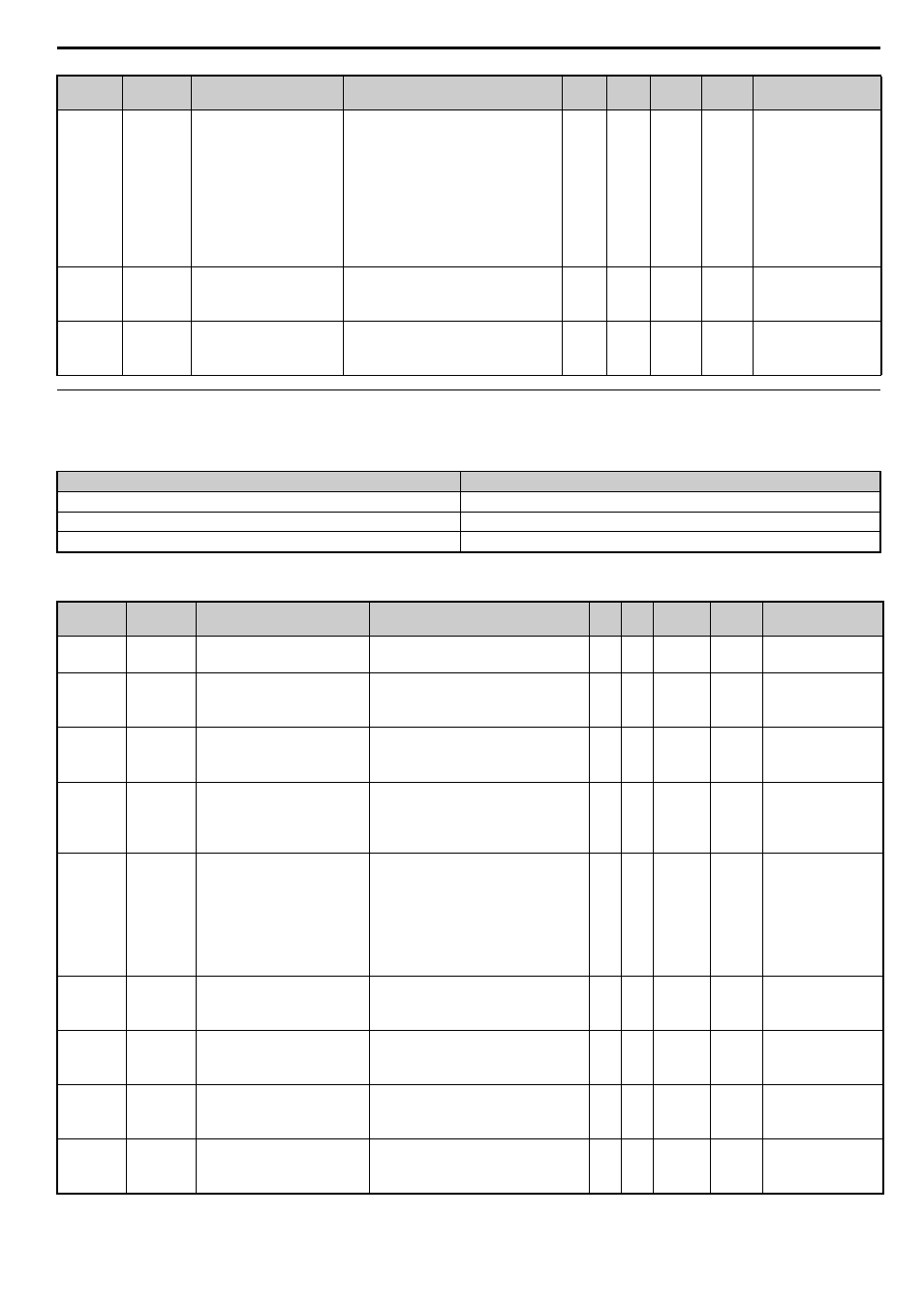
Control Supervisor Object - 41 (Class 0x29)
Services Supported
Attributes Supported
1
3
Motor Type
Displays the type of motor used.
3: PM motor
7: IM motor
Determined by the control mode set
to A1-02.
When A1-02 = 5, 6, 7, this attribute
becomes 3 (PM motor).
When A1-02 = 0, 1, 2, 3, this attribute
becomes 7 (IM motor).
{
–
Byte
–
Depends on A1-02,
Control Method
Selection
1
6
Rated Current [0.1 A]
Motor rated current.
Displayed in 0.1 A units. Changes
according to the current scale (CS).
{
{
Byte
–
Depends on capacity
1
7
Rated Voltage [1 V]
Motor rated voltage.
Displayed in 1 V units. Changes
according to the voltage scale (VS).
{
{
Byte
–
Depends on capacity
Service Code No. (hex)
Service Name
0E
Get Attribute Single
10
Set Attribute Single
05
Reset
Instance
ID
Attribute
Name
Description
Get Set
Size
Range
Default
0
1
Object Software Revision
Revision number of the Control
Supervisor Object.
{
–
Word
–
1
1
3
Run 1 (Forward Run
Command)
Forward Running
0: Stop
1: Forward Running
{
{
Byte
0, 1
0
1
4
Run 2 (Reverse Run
Command)
Reverse Running
0: Stop
1: Reverse Running
{
{
Byte
0, 1
0
1
5
NetCtrl (Command)
Run command from Network
0: Depends on b1-02
1: Enables the run command from
network
{
{
Byte
0, 1
0
1
6
State
Drive status.
2: Not ready
3: Ready (stopped)
4: Enabled (Run command present)
5: Deceleration to stop
6: Fault stop
7: Fault
{
–
Byte
–
3
1
7
Running 1 (FWD)
Forward Running
0: Stop
1: Forward Running
{
–
Byte
–
0
1
8
Running 1 (REV)
Reverse Running
0: Stop
1: Reverse Running
{
–
Byte
–
0
1
9
Ready
Drive Ready
0: Not ready
1: Ready
{
–
Byte
–
1
1
10
Fault
Drive Fault
0: No Drive Fault
1: Fault
{
–
Byte
–
0
Instance
ID
Attribute
Name
Description
Get
Set
Size
Range
Default