Speed and torque control output - 22 (0x16) – Yaskawa 1000 Series Drive Option - DeviceNet Technical Manual User Manual
Page 24
8 Output Assemblies (Drive Consumes)
24
YASKAWA ELECTRIC SIEP C730600 43B 1000-Series Option SI-N3 Technical Manual
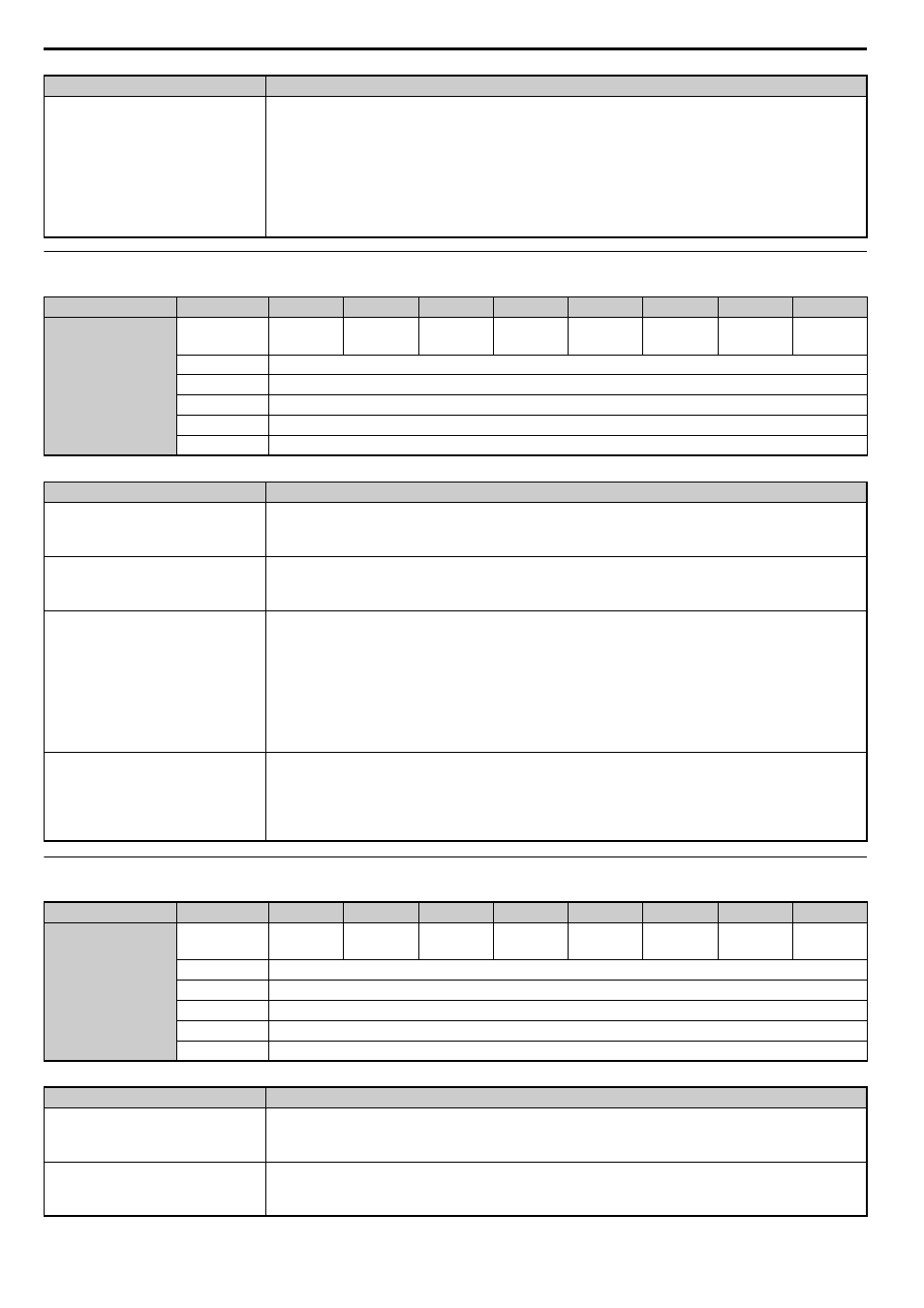
Speed and Torque Control Output - 22 (0x16)
Extended Speed and Torque Control Output - 23 (0x17)
Speed Reference
Speed Command
Sets drive speed reference
Speed reference data:
Frequency reference / 2
SS
(SS: Speed scale)
Setting range: 0 to 0xFFFF
For example, when setting a reference of 1024 with a speed scale of 2
Speed reference data = 1024 / 2
2
= 256 = 0x0100
Unit depends on o1-03.
Output Instance
Byte
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
22
0
–
–
–
–
–
Fault
Reset
–
Run
Fwd
1
–
2
Speed Reference (Low Byte)
3
Speed Reference (High Byte)
4
Torque Reference/Torque Limit (Low Byte)
5
Torque Reference/Torque Limit (High Byte)
Name
Description
Run Fwd
Forward Run Command
0: Stop
1: Forward Run
Fault Reset
Fault Reset
0: No Fault Reset
1: Fault Reset
Speed Reference
Speed Command
Sets drive speed reference
Speed reference data:
Frequency reference / 2
SS
(SS: Speed scale)
Setting range: 0 to 0xFFFF
For example, when setting a reference of 1024 with a speed scale of 2
Speed reference data = 1024 / 2
2
= 256 = 0x0100
Unit depends on o1-03.
Torque Reference/Torque Limit
Torque Reference/Torque Limit
Sets the torque reference and torque limit in units of 0.1%.
Sets the torque reference when using torque control (d5-01 = 1).
Sets the torque limit when using speed control (d5-01 = 0).
The torque reference and torque limit are disabled when F6-06 = 0.
Output Instance
Byte
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
23
0
–
Net
Ref
Net
Ctrl
–
–
Fault
Reset
Run
Rev
Run
Fwd
1
–
2
Speed Reference (Low Byte)
3
Speed Reference (High Byte)
4
Torque Reference/Torque Limit (Low Byte)
5
Torque Reference/Torque Limit (High Byte)
Name
Description
Run Fwd
Forward Run Command
0: Stop
1: Forward Run
Run Rev
Reverse Run Command
0: Stop
1: Reverse Run
Name
Description