Rockwell Automation 20A PowerFlex 70EC/700VC User Manual
Page 87
Process PID Loop
83
When a digital input is configured as “PI Enable,” the PID Enable bit of [PI
Control] must be turned On for the PID loop to become enabled. If a digital
input is not configured as “PI Enable” and the PID Enable bit in [PI Control] is
turned On, then the PID loop may become enabled. If the PID Enable bit of [PI
Control] is left continuously, then the PID may become enabled as soon as the
drive goes into Run. If analog input signal loss is detected, the PID loop is
disabled.
•
PI Hold - The Process PID Controller has the option to hold the integrator at the
current value so if some part of the process is in limit the integrator will
maintain the present value to avoid windup in the integrator.
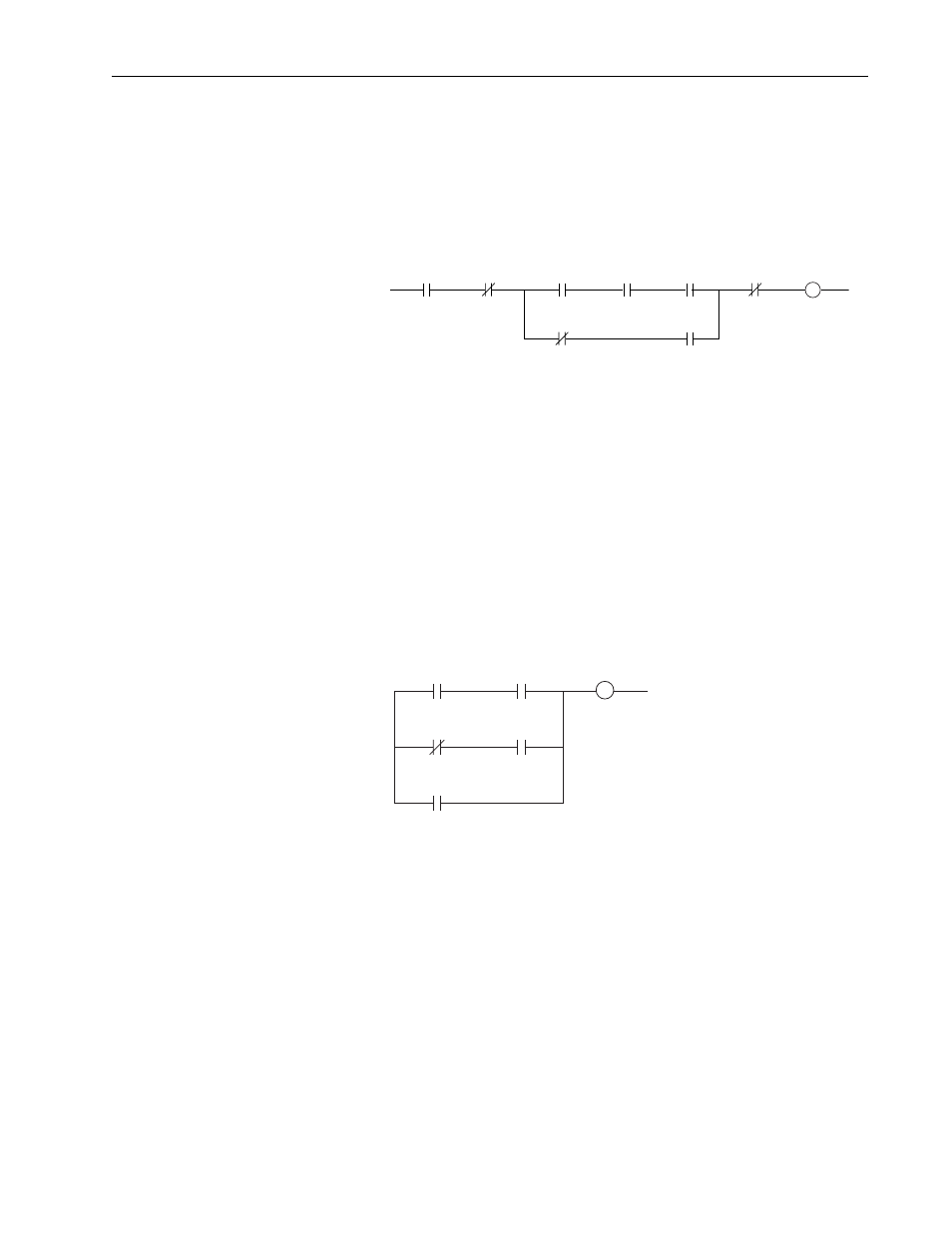
The logic to hold the integrator at the current value is shown in the following
ladder diagram. There are three conditions under which Hold will turn On.
– If a digital input is configured to provide PID Hold and that digital input is
turned on then the PID integrator will stop changing. Note that when a
digital input is configured to provide PID Hold that takes precedence over
the PID Control parameter.
– If a digital input is not configured to provide PID Hold and the PID Hold bit
in the PID Control parameter is turned On then the PID integrator will stop
changing.
– If the current limit or voltage limit is active then the PID is put into Hold.
•
PI Reset - This feature holds the output of the integral function at zero. The
term “anti windup” is often applied to similar features. It may be used for
integrator preloading during transfer and can be used to hold the integrator at
zero during “manual mode.”
For example: a process whose feedback signal is below the reference point,
creating error. The drive will increase its output frequency in an attempt to bring
the process into control. If, however, the increase in drive output does not zero
the error, additional increases in output will be commanded. When the drive
reaches programmed Maximum Frequency, it is possible that a significant
amount of integral value has been “built up” (windup). This may cause
undesirable and sudden operation if the system were switched to manual
operation and back. Resetting the integrator eliminates this windup.
Stopping
PI_Status
.Enabled
DigInCfg
.PI_Enable
DigInCfg
.PI_Enable
DigIn
.PI_Enable
PI_Control
.PI_Enable
PI_Control
.PI_Enable
Signal Loss
Running
PI_Status
.Hold
DigInCfg
.PI_Hold
DigInCfg
.PI_Hold
DigIn
.PI_Hold
PI_Control
.PI_Hold
Current Lmt
or Volt Lmt