Rockwell Automation 20A PowerFlex 70EC/700VC User Manual
Page 111
Speed/Torque Mode
107
When the Process PID loop is setup for torque trim ([Process PI Config], bit 8
“Torque Trim” is set to 1), the output of the Process PI Loop also becomes a torque
reference.
The final torque reference, in the Torque Mode, is the sum of scaled Torque Ref A,
scaled Torque Ref B (700VC only) and the output of the Process PID loop when it
is set to trim torque.
Min Torq/Spd and Max Torq/Spd Modes
These modes compare the speed and torque commands. The smallest (min mode)
or largest (max mode) of these two values is used. These modes can be thought of
as a Speed Limited Adjustable Torque operation. Instead of operating the drive as a
pure torque regulator, the “runaway” condition can be avoided by limiting the speed
to whatever speed reference the drive is programmed for. A winder is a good
example for the application of the Min Torq/Spd operating mode. Max mode would
be used if both speed and torque are negative, in which case the largest (smallest
negative value) is the result.
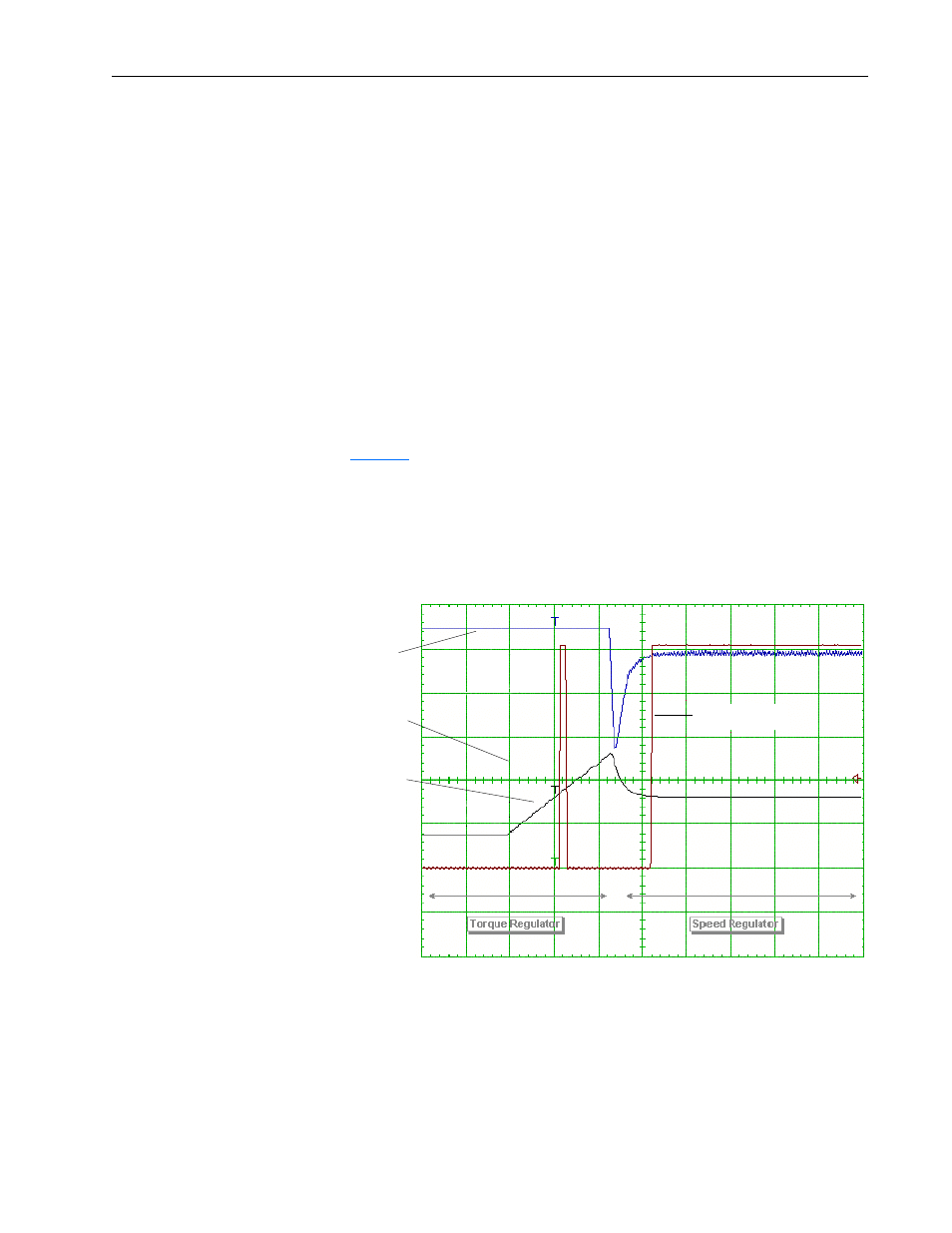
Figure 20
illustrates how min mode operates. The drive begins operating as a torque
regulator. The torque reference causes the motor to operate at 308 RPM. The speed
reference is 468 RPM, so the minimum is to operate as a torque regulator. While
operating in torque regulation, the load decreases and the motor speeds up. Notice
that the torque command has not changed. When the speed regulator comes out of
saturation, it clamps the speed and now the drive operates as a speed regulator.
Figure 20 Min Mode Operation
Sum Mode
This mode allows an external torque input to be summed with the torque command
generated by the speed regulator, and can be used for applications that have precise
speed changes with critical time constraints. If the torque requirement and timing
are known for a given speed change, then the external torque input can be used to
preload the integrator. The timing of the speed change and the application of an
external torque command change must be coordinated for this mode to be useful.
The sum mode will then work as a feed forward to the torque regulator.
Internal Torque
Command
Load Step (Decrease)
Speed Feedback
308
RPM
At Speed Relay