Rockwell Automation 20A PowerFlex 70EC/700VC User Manual
Page 84
80
Process PID Loop
PID Configuration
[PI Configuration] is a set of bits that select various modes of operation. The value
of this parameter can only be changed while the drive is stopped.
•
Exclusive Mode - see
.
•
Invert Error - This feature changes the “sign” of the error, creating a decrease
in output for increasing error and an increase in output for decreasing error. An
example of this might be an HVAC system with thermostat control. In Summer,
a rising thermostat reading commands an increase in drive output because cold
air is being blown. In Winter, a falling thermostat commands an increase in
drive output because warm air is being blown.
The PID has the option to change the sign of PID Error. This is used when an
increase in feedback should cause an increase in output. The option to invert the
sign of PID Error is selected in the PID Configuration parameter.
•
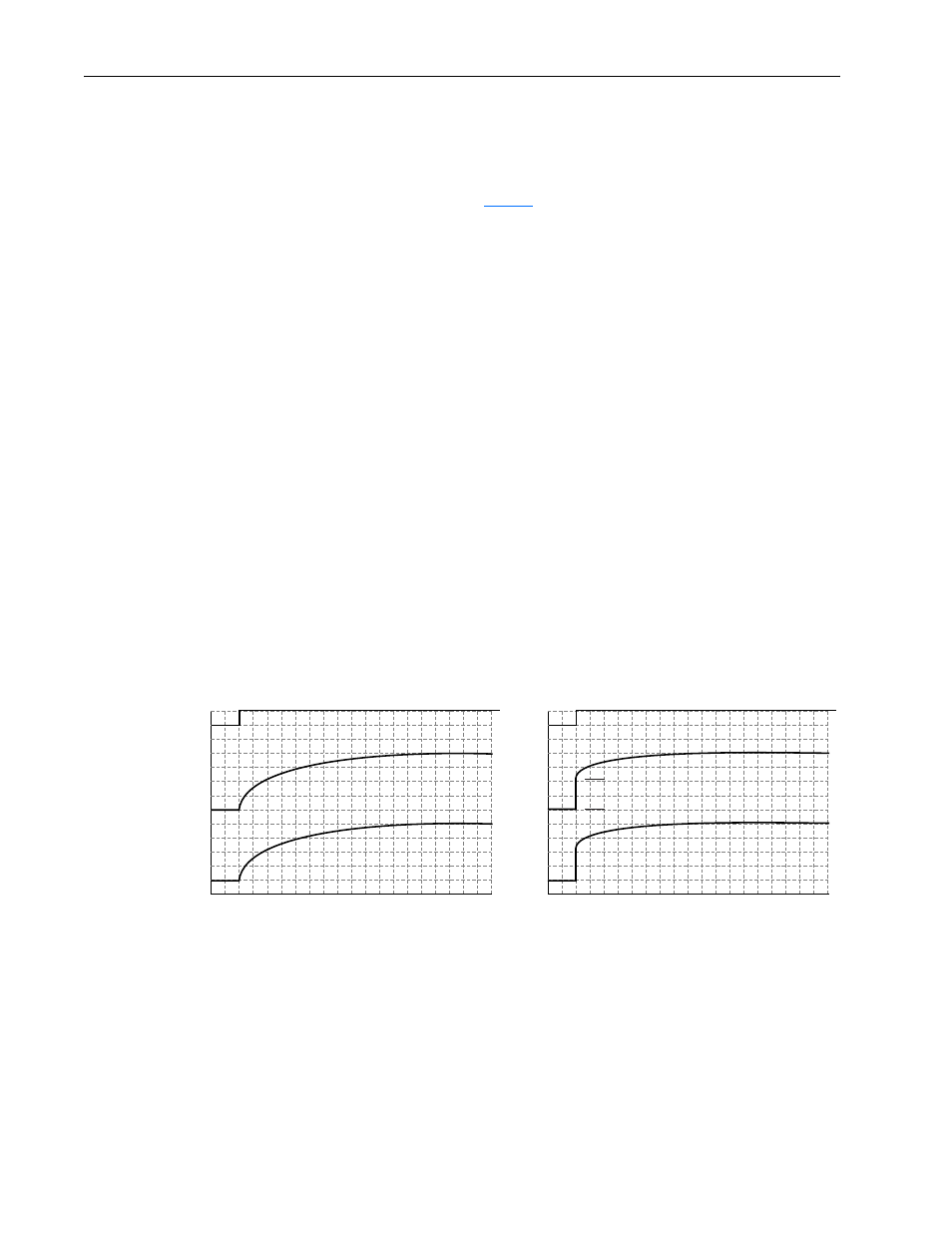
Preload Integrator - This feature allows the PID Output to be stepped to a
preload value for better dynamic response when the PID Output is enabled.
Refer to the diagram below. If PID is not enabled the PID Integrator may be
initialized to the PID Pre-load Value or the current value of the commanded
speed. The operation of Preload is selected in the PID Configuration parameter.
By default, Pre-load Command is off and the PID Load Value is zero, causing a
zero to be loaded into the integrator when the PID is disabled. As shown in
diagram A below, when the PID is enabled the PID output will start from zero
and regulate to the required level. When PID is enabled with PID Load Value is
set to a non-zero value the output begins with a step as shown in Diagram B
below. This may result in the PID reaching steady state sooner, however if the
step is too large the drive may go into current limit which will extend the
acceleration.
Pre-load command may be used when the PID has exclusive control of the
commanded speed. With the integrator preset to the commanded speed there is no
disturbance in commanded speed when PID is enabled. After PID is enabled the
PID output is regulated to the required level.
PI Enabled
Spd Cmd
PI Output
PI Pre-load Value
PI Pre-load Value = 0
PI Pre-load Value > 0
Diagram A
Diagram B