Process pi control – Rockwell Automation 20A PowerFlex 70EC/700VC User Manual
Page 147
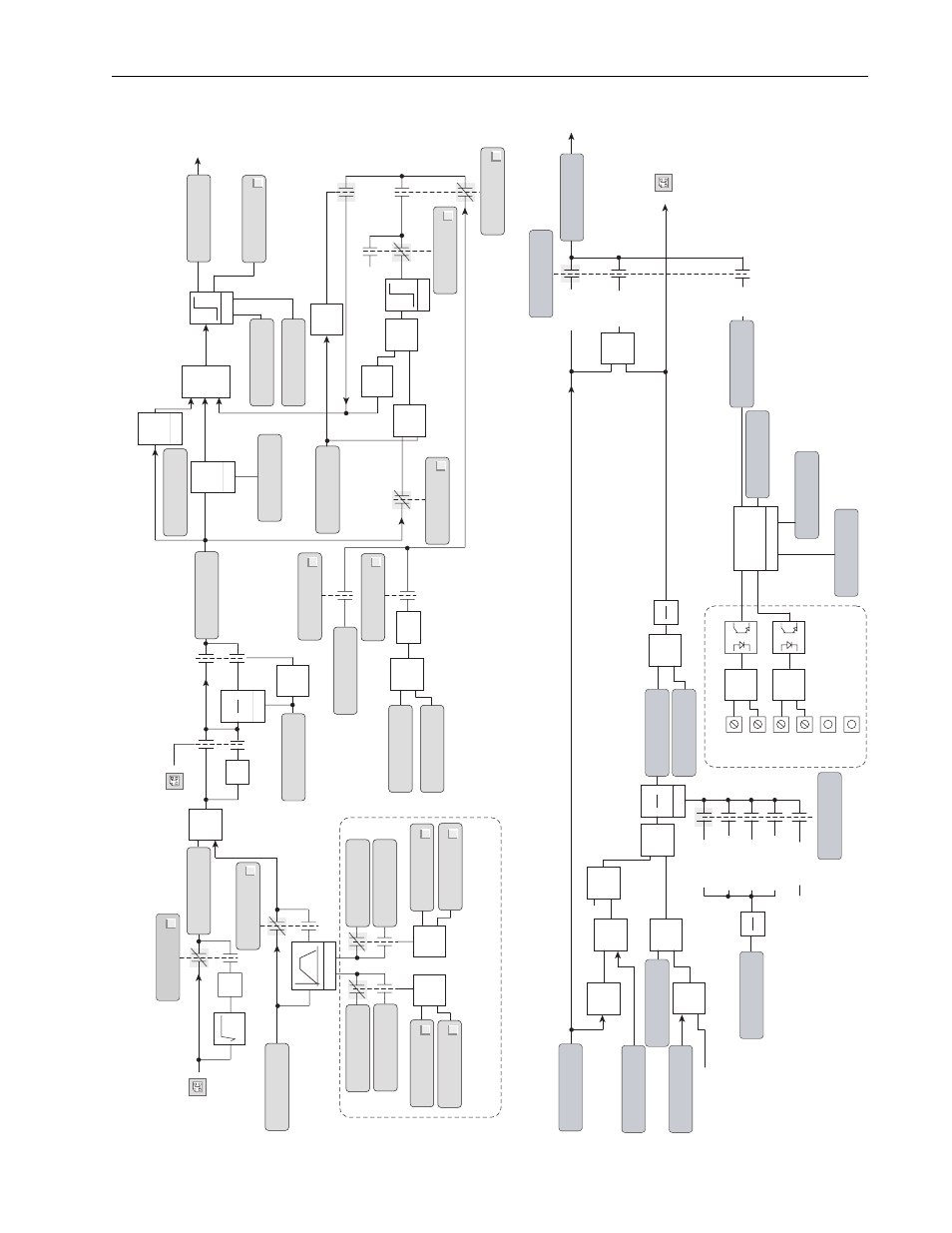
PowerFlex 70EC Block Diagrams
143
Bit 5 - Feedbak Sqrt
124 - PI Configuration
0.00 %
136 - PI Fdback Meter
Bit 3 - Ramp Ref
124 - PI Configuration
50.00 %
135 - PI Ref Meter
10.0 Secs
140 - Accel Time 1
10.0 Secs
142 - Decel Time 1
10.0 Secs
143 - Decel Time 2
10.0 Secs
141 - Accel Time 2
Bit 8 - Accel 1
271 - Drive Logic Rslt
Bit 9 - Accel 2
271 - Drive Logic Rslt
Bit 10 - Decel 1
271 - Drive Logic Rslt
Bit 11 - Decel 2
271 - Drive Logic Rslt
0.0 R/s
139 - PI BW Filter
50.00 %
137 - PI Error Meter
0.00 Secs
459 - PI Deriv Time
0.0 Hz
23 - Speed Reference
0.0 %
133 - PI Preload
Bit 2 - Preload Mode
124 - PI Configuration
0.0 %
133 - PI Preload
Bit 0 - Excl Mode
124 - PI Configuration
1.00
130 - PI Prop Gain
0.0 %
138 - PI Output Meter
Bit 3 - PI InLimit
134 - PI Status
-100.0 %
131 - PI Lower Limit
100.0 %
132 - PI Upper Limit
2.00 Secs
129 - PI Integral Time
Bit 1 - PI Hold
134 - PI Status
Bit 2 - PI Reset
134 - PI Status
Bit 0 - PI Enabled
134 - PI Status
Limit
Limit
Z
-1
–1
>0
>0
F
rom Process
PI F
eedbac
k Select
F
rom Process PI
Digital Inputs
Ramp
X
÷
X
÷
–
+
+
+
+
+
+
R
S
R
S
ω
s +
ω
LP
ass
K
d
*S
D Gain
Kp
P Gain
10
SqRt
100
1
0
1
0
0
1
0
1
Note:
If an
y of the Dr
iv
e Logic Rslt par
ameters change from a 1 to a 0,
latching will occur
, holding last state
.
0.0 Hz
1 - Output Freq
60.0 Hz
43 - Motor NP Hertz
0.00 Amps
4 - Torque Current
40.0 RPM
121 - Slip RPM @ FLA
40.0
122 - Slip Comp Gain
0.0 RPM
123 - Slip RPM Meter
4
49 - Motor Poles
Sensrls Vect
53 - Motor Cntl Sel
Quadrature
412 - Motor Fdbk Type
1024
413 - Encoder PPR
0
414 - Enc Pos Feedback
0.0
415 - Encoder Speed
Open Loop
80 - Feedback Select
0.0
25 - Speed Feedback
X
[1]
÷
X
÷
X
X
X
X
X
X
+
–
+
–
+
–
To Speed Control
V/Hz
1
45
1
120
ω
s +
ω
LP
ass
Processing
Min
Abs
4
3
2
1
0
Sensr
ls V
ect
Open Loop
Slip Comp
Encoder
ENC-6
Encoder Board (Option)
ENC-5
ENC-4
ENC-3
ENC-2
ENC-1
SV Economiz
e
Custom V/Hz
Fan/Pump V/Hz
FVC V
ector
Encoder
NP T
orque
Current
3
1
0
Process PI
Control