Triton Perspective User Manual
Page 102
94 |
P a g e
F e b r u a r y 2 0 1 1
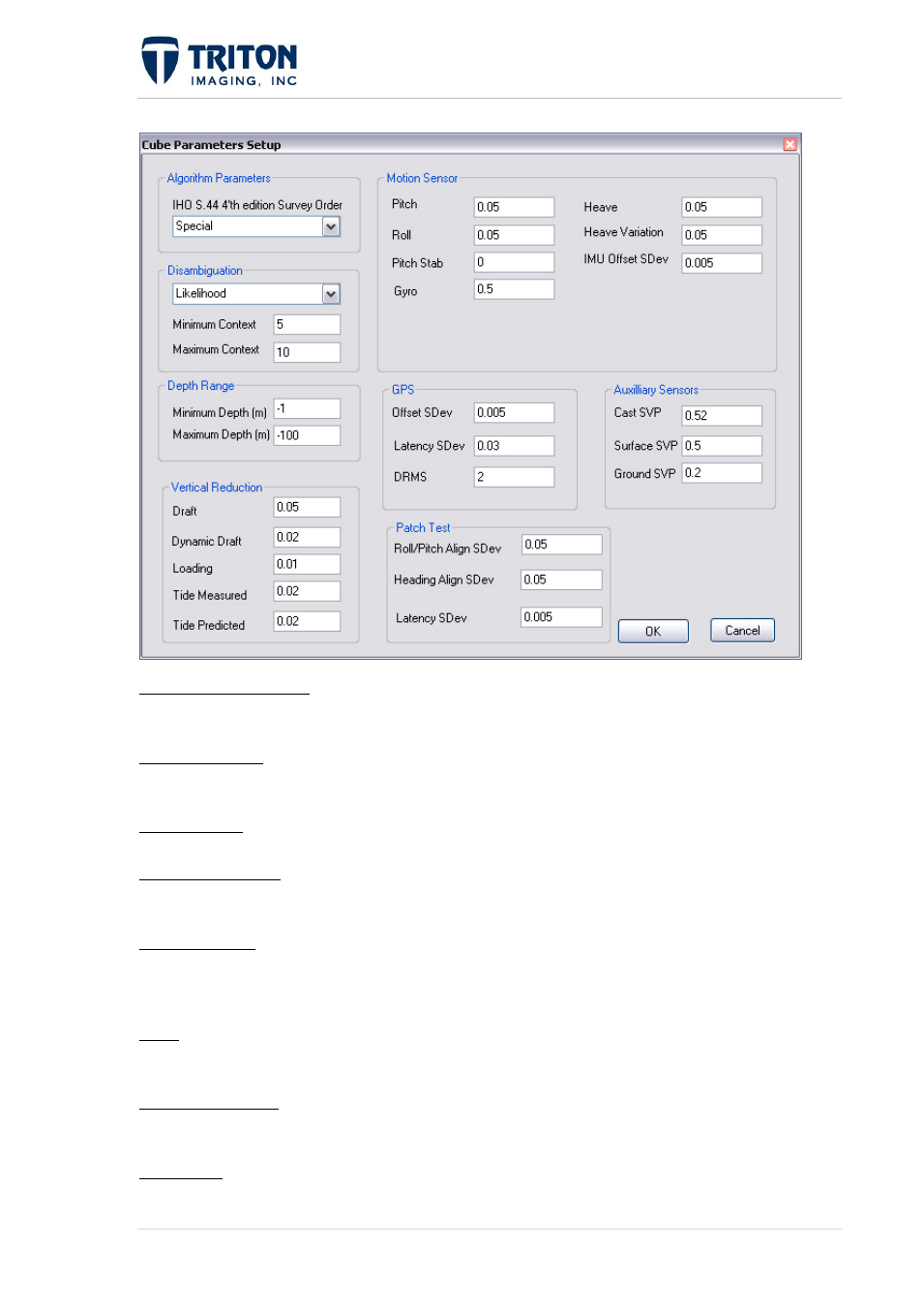
Algorithm Parameters: Indicates what IHO survey order the data is intended to meet.
Options include 'Special', 'One', 'Two', and 'Three'.
Disambiguation: Methods include 'Prior', 'Likelihood', and 'Posterior'. The user can also set
the maximum and minimum context to apply.
Depth Range: Expected depth range for collected data.
Vertical Reduction: Uncertainties with the vertical measurements are entered here for 'Draft',
'Dynamic Draft', 'Loading', Tide Measured', and 'Tide Predicted'.
Motion Sensor: Uncertainties in the motion data are entered here for 'Pitch', 'Roll', 'Pitch
Stabilization', 'Gyro', 'Heave', 'Heave Variability', and 'IMU Offset SDev' (standard
deviation).
GPS: Uncertainties in the GPS data are entered here for 'Offset SDev', 'Latency SDev', and
for 'DRMS'.
Auxiliary Sensors: Uncertainties in the sound velocity measurements are entered here for the
'Cast SVP', 'Surface SVP', and for the 'Ground SVP' when applicable.
Patch Test: Uncertainties in the patch test results are entered here for the 'Roll/Pitch Align
SDev', 'Heading Align SDev', and the 'Latency SDev'.