Caution – IAI America RCM-GW-PR User Manual
Page 93
87
PfofiBus Gateway
(2) Home return operation
The controller unit uses an incremental position detector (encoder), which means that once the power
is cut off, the mechanical coordinates will be lost.
Accordingly, home return must be performed after the power is turned on to establish the mechanical
coordinates.
To perform home return operation, input the home return command (HOME) signal.
For your information, home return operation is not required if the simple absolute R unit is connected
to the controller unit to convert the axes into absolute axes.
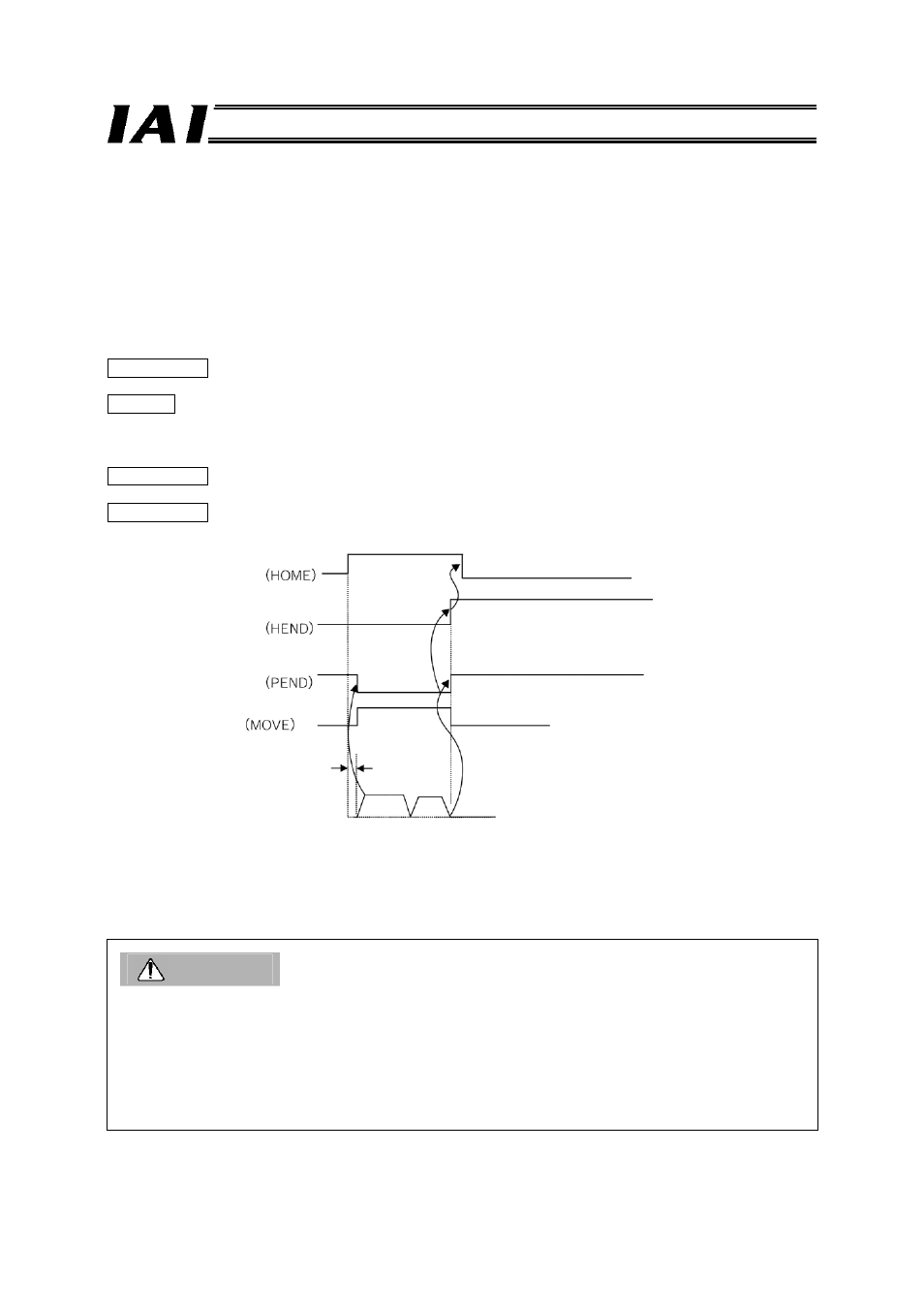
Operation timings
PLC process 1: The home return command (HOME) signal turns “1” (ON) when the start button is
pressed.
Operation:
[1] The actuator starts moving toward the mechanical end on the home side.
[2] After contacting the mechanical end, the actuator reverses its direction and then
stops at the home position
→ The home return complete (HEND) signal turns “1”
(ON).
PLC process 2: The home return command (HOME) signal is turned “0” (OFF) after confirmation of the
HEND signal turning “1” (ON).
PLC process 3: The actuator starts continuous operation.
Caution
Pay attention to the following points when performing home return:
[1] Confirm that no obstacle exists in the direction of home return.
[2] Should an obstacle be found in the direction of home return, tentatively move the actuator in the
direction opposite home and remove the obstacle.
[3] Turning the HOME signal “1” (ON) turns the PEND signal “0” (OFF) and MOVE signal “1” (ON).
Turn the HOME signal “0” (OFF) again after confirming that the HEND signal has turned “1” (ON) while
the HOME signal is still “1” (ON).
Home return command
Home return complete
Positioning complete
Moving
Actuator movement
[1] [2]
1 msec or less
Po
w
e
r in
p
u
t
po
sition
M
e
c
h
an
ic
al
e
n
d
H
o
m
e
po
s
iti
on