IAI America RCM-GW-PR User Manual
Page 57
51
PfofiBus Gateway
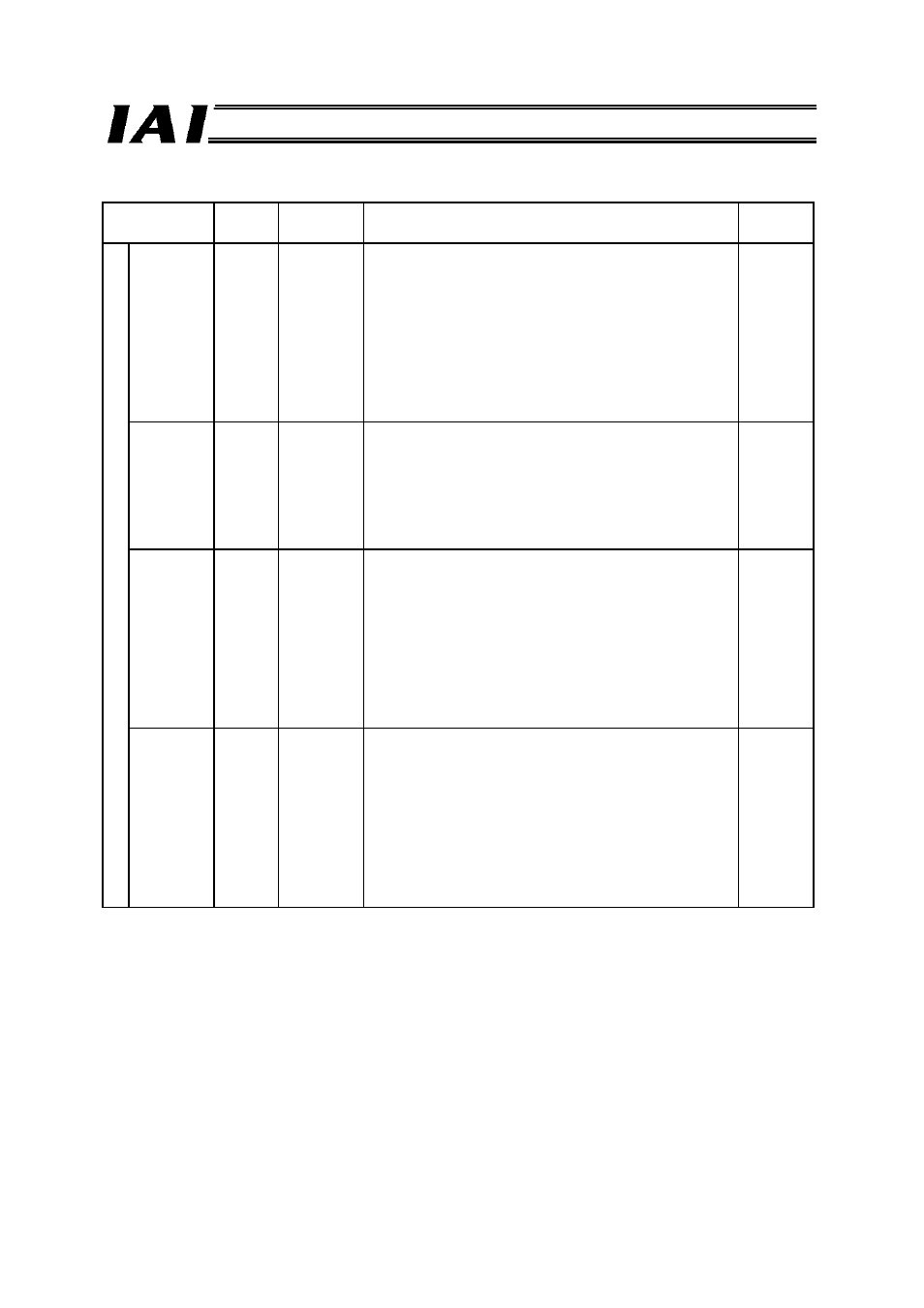
I/O Signal Details
Signal type
Bit
Signal
name
Description Details
PLC ou
tput
Target
position
data
24-bit
data
-
Set a signed 24-bit integer (unit: 0.01 mm) based on
hexadecimal notation.
Example) To specify +25.4 mm, set “0009ECH”
(“2540” in decimal notation).
z The maximum value that can be set is +9999.99
mm = 999999 (decimal) = 0F423FH (hexadecimal).
z A negative value is indicated by a 2’s complement,
which means that the most significant bit becomes
“1.”
z Set position data within the soft stroke limits.
6.3 (4)
Current-
limiting
value for
push
motion
8-bit
data
-
To set the push force, set the current-limiting value for
push motion as a hexadecimal value (unit: %).
The setting range is from “00H” to “FFH,” with FFH
corresponding to 100%.
Example) To specify 50%, set “7FH” (corresponding
to the decimal value of 127 obtained by
FFH (255) x 50%).
6.3 (4)
Speed
24-bit
data
-
Set a 24-bit integer (unit: 0.01 mm/sec) based on
hexadecimal notation. The maximum value is
“0F423FH” (“999999” in decimal notation).
Example) To specify 200 mm/sec, set “004E20H”
(“20000” in decimal notation).
(Cautions)
If speed is not set or the set speed is “0,” the actuator
will remain stopped. No alarm will generate.
If the set speed is changed to “0” during movement, the
actuator will decelerate to a stop.
6.3 (4)
Acceleration/
deceleration
8-bit
data
-
Set an eight-bit integer (unit: 0.01 G) based on
hexadecimal notation.
Example) To specify 0.2 G, set “14H” (“20” in decimal
notation).
The maximum value is “C8H” (“200” in decimal
notation) corresponding to 2 G.
(Cautions)
Even if acceleration/deceleration is not set, the setting
of parameter No. 9, “Default acceleration/deceleration”
will not be applied.
6.3 (4)