IAI America RCP2W-GRLS User Manual
Page 99
89
10. Specifications
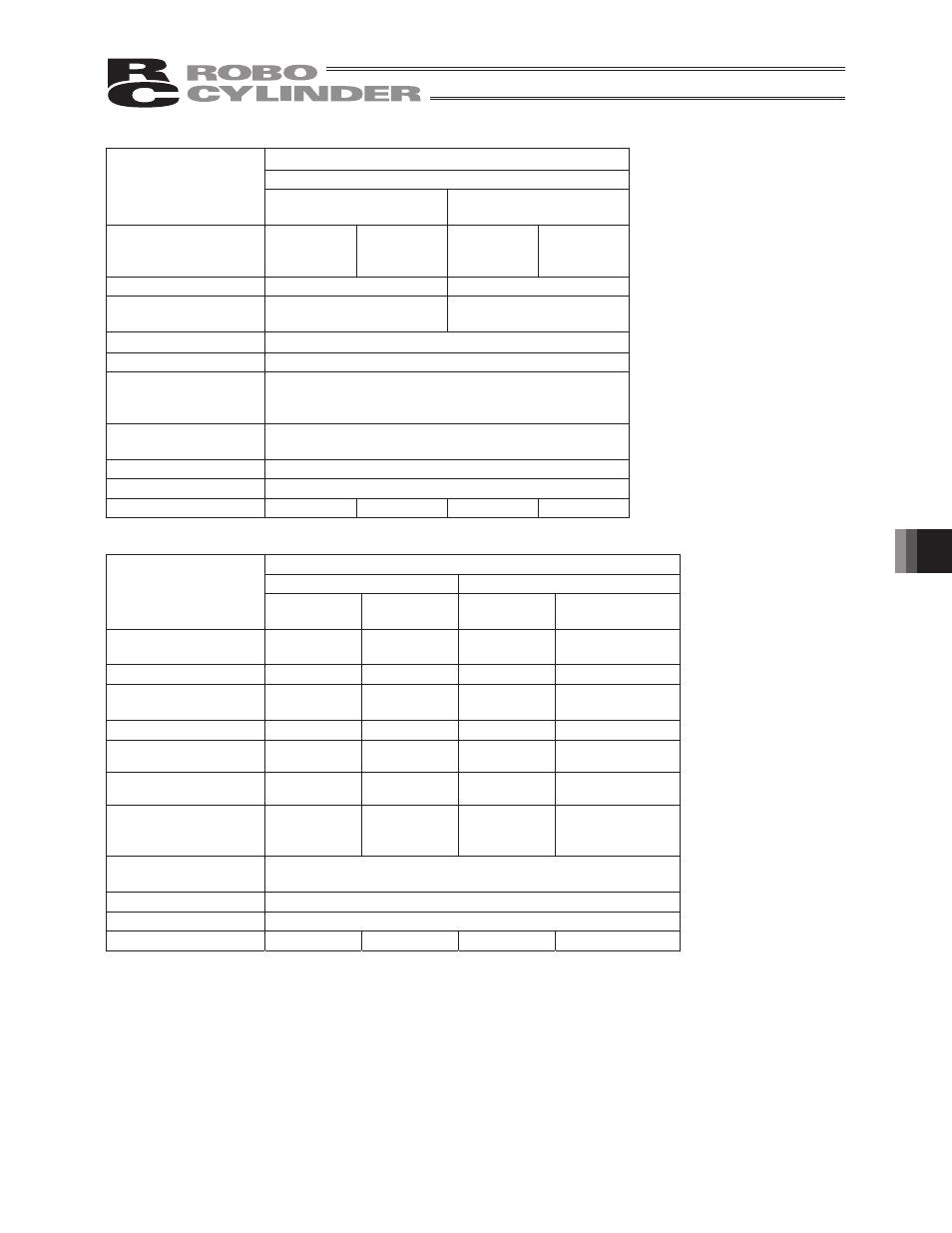
Long-stroke type
Slide type
RCP2-GRST
(Gear ratio: 2.27)
RCP2-GRST
(Gear ratio: 1.05)
Open/close stroke
40 mm
(20 mm
per finger)
60 mm
(30 mm
per finger)
80 mm
(40 mm
per finger)
100 mm
(50 mm
per finger))
Maximum gripping force
20 N
40 N
Maximum open/close
speed
75 mm/s
34 mm/s
Stopping repeatability
r0.01 mm
Backlash
0.2 mm max. on each side
Allowable load moment
Ma: 2.93 N-m
Mb: 2.93 N-m
Mc: 5.0 N-m
Position detection
method
Magnetic incremental encoder 800 P/rev
Finger drive method
Stepping motor + Timing belt + Worm/rack gears
Finger guide structure
Linear guide (ball)
Gripper weight
0.51 kg
0.55 kg
0.61 kg
0.66 kg
Three-finger type
Slide type
Lever type
RCP2-
GR3SS
RCP2-
GR3SM
RCP2-GR3LS
RCP2-GR3LM
Open/close stroke
5 mm
(per finger)
7 mm
(per finger)
19 deg
(-14 to +5)
19 deg
(-14 to +5)
Maximum gripping force
22 N
102 N
18 N
51 N
Maximum open/close
speed
400 mm/s
(Per side)
50 mm/s
(Per side)
200 deg/s
(Per side)
200 deg/s
(Per side)
Stopping repeatability
r0.01 mm
r0.01 mm
r0.01 deg
r0.01 deg
Backlash
0.3 mm max.
on each side *1
0.3 mm max.
on each side *1
1.0 deg max.
on each side *1
1.0 deg max.
on each side *1
Lost motion
0.1 mm max.
on each side
0.1 mm max.
on each side
0.15 deg max.
on each side
0.15 deg max.
on each side
Allowable load moment
(*2)
Ma: 3.8 N-m
Mb: 3.8 N-m
Mc: 3.0 N-m
Ma: 6.3 N-m
Mb: 6.3 N-m
Mc: 5.7 N-m
---
---
---
---
---
---
Position detection
method
Magnetic incremental encoder 800 P/rev
Finger drive method
Worm gear + Worm wheel gear
Finger guide structure
Cross roller guide
Gripper weight
0.6 kg
1.2 kg
0.6 kg
1.1 kg
*1 Constantly pushed toward the opening side by a spring.
*2 Moments generated in a standstill state