IAI America RCP2W-GRLS User Manual
Page 123
113
1
1. Appendix
Model
Maximum allowable load
torque
T
max
[N m]
RCP2-GRLS 0.05
RCP2-GR3LS 0.1
RCP2-GR3LM 0.3
(1) Allowable thrust load
Use the actuator in such a way that the load applied to the finger opening/closing axis in the thrust
direction will remain equal to or less than the allowable load.
Model
Allowable thrust load
F
max
[N]
RCP2-GRLS 15
RCP2-GR3LS -
RCP2-GR3LM -
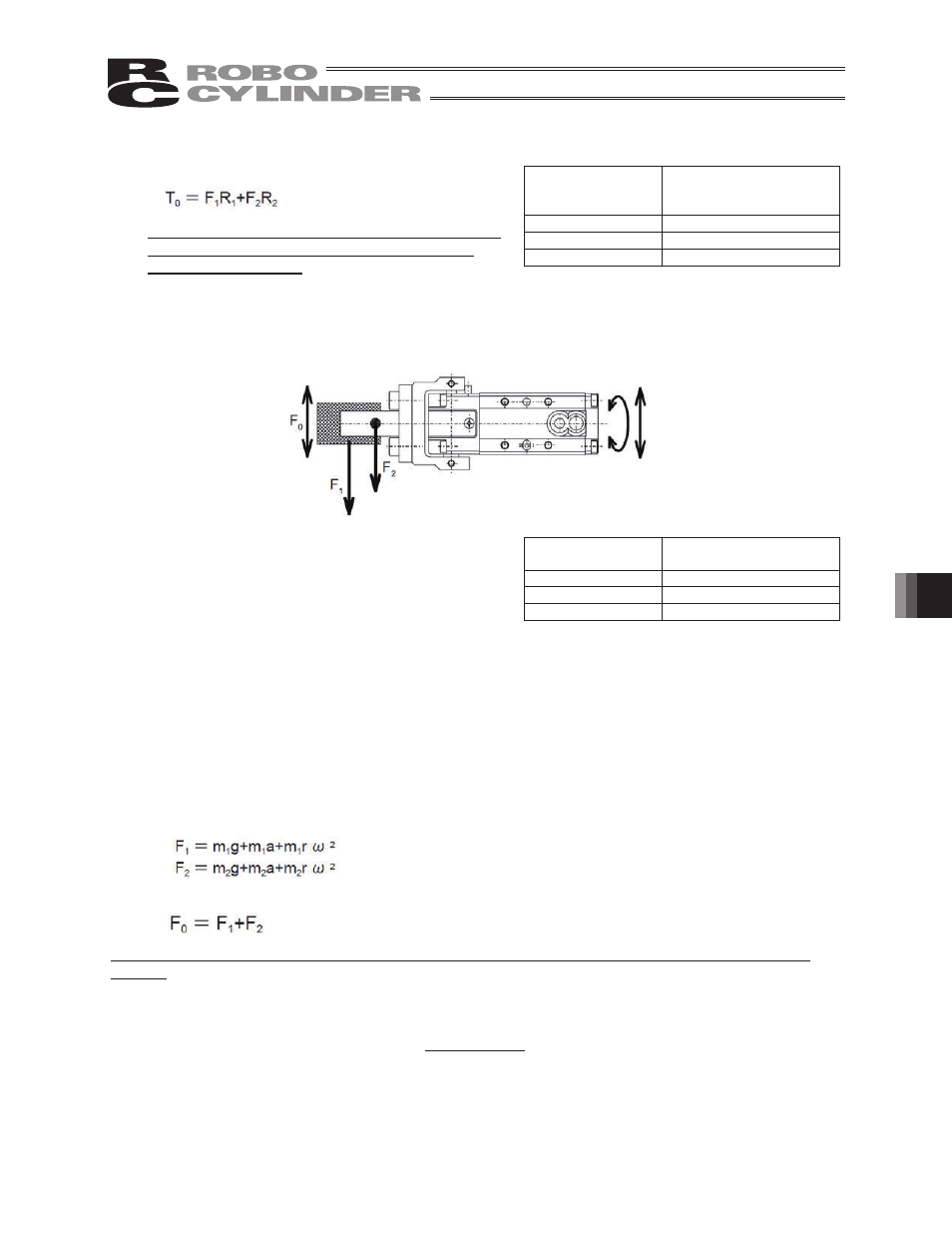
External forces applied to the work part and finger attachment
Based on the use conditions of the gripper, calculate the following external forces applied to the
work part and finger attachment and add up the calculated forces:
a) Weight of the work part and finger attachment
F = mg
g: Gravitational acceleration
b) Inertial force when the gripper performs a linear motion
F = ma
a: Acceleration/deceleration during movement
c) Centrifugal force when the gripper performs a rotary motion
F = mr
Z
2
r: Radius of rotation,
Z: Angular velocity
Total external forces
--- External force applied to the work part
--- External force applied to the finger attachment
Load generating on the finger due to an external force
Confirm that the value calculated above is equal to or less than the applicable allowable thrust load in
Table 4.
Note 1: All allowable inertial moments, allowable load torques and allowable thrust loads indicate static
values per finger.
Note 2: Select finger attachments that are as small and light as possible within the allowable ranges. If the
fingers are long and large or heavy, moments may generate due to impact upon gripping of the
work part and consequently the actuator performance may drop or mechanical parts may be
negatively affected.
Torque generating on the finger due to an
external force
Table 3 Allowable Load Torques of Fingers *Note 1
Confirm that the value calculated above is equal to
or less than the applicable maximum allowable
load torque in Table 3.
Table 4 Allowable Thrust Loads of Fingers *Note 1
m
1
: Mass of the work part (kg)
m
2
: Mass of the finger attachment (kg)
F
1
: External force applied to the work part (N)
F
2
: External force applied to the finger attachment (N)
F
0
: Load generating in the finger attachment (N)