IAI America RCP2W-GRLS User Manual
Page 119
109
1
1. Appendix
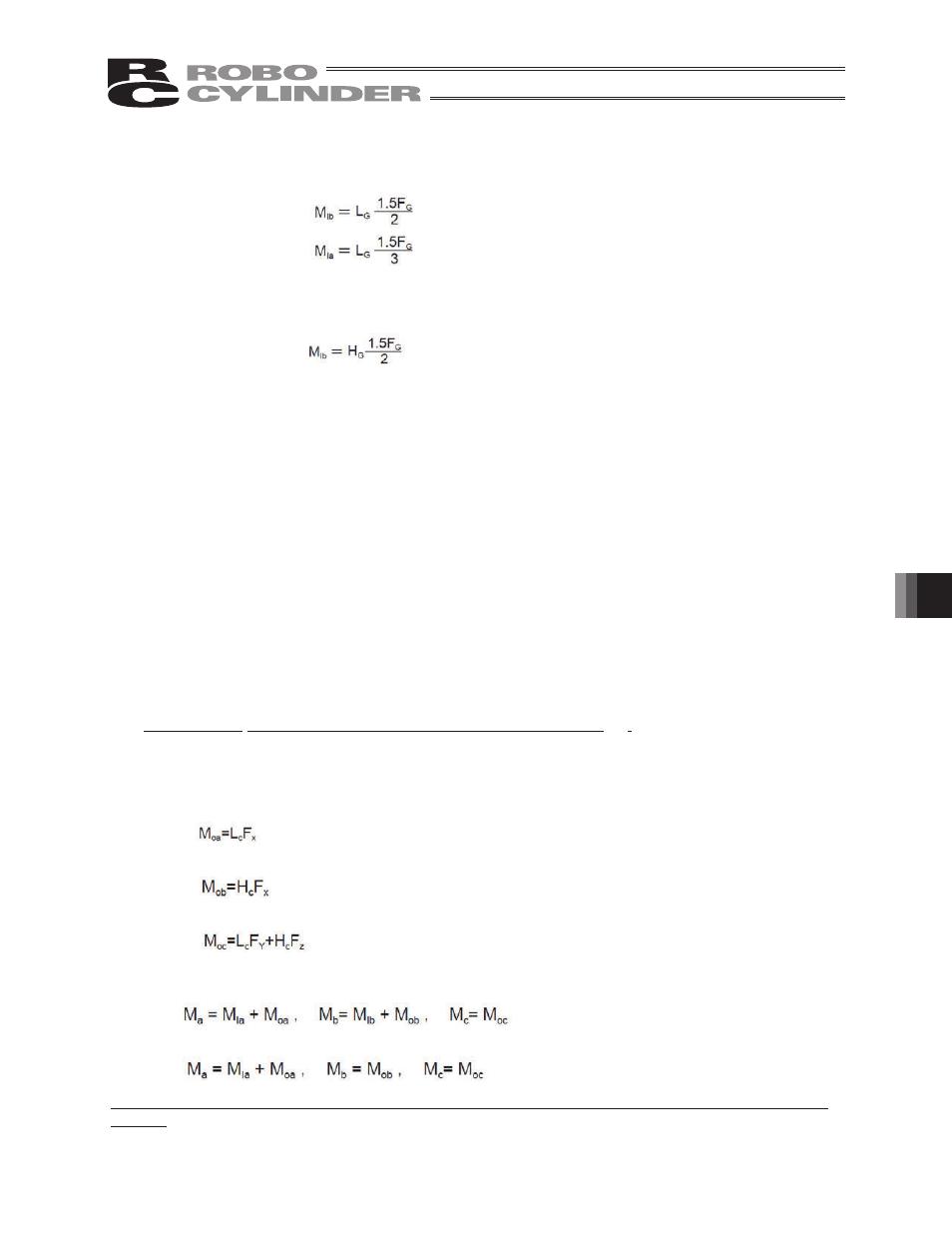
(1) Moment generating around the finger due to the gripping force
[1] M
a
moment [M
Ia
]
• Two-finger type
• Three-finger type
F
G
: Gripping force of the gripper (N)
[2] M
b
moment [M
Ib
]
• Two-finger type
• Three-finger type: Need not be calculated.
F
G
: Gripping force of the gripper (N)
(2) Moment generating around the finger due to an external force
When the gripper is installed on a Cartesian robot, articulated robot or any other actuator and caused
to perform a linear or rotary motion, its finger attachments receive external forces other than the
gripping force.
External forces applied to the work part and finger attachment [F
X
, F
Y
, F
Z
]
Based on the use conditions of the gripper, calculate the following external forces applied to each
finger attachment in three directions of X, Y and Z, and add up the calculated forces:
a) Weight of the work part and finger attachment
F = mg, m: Mass of the work part and finger attachment, g: Gravitational acceleration
b) Inertial force when the gripper performs a linear motion
F = ma, a: Acceleration/deceleration during movement
c) Centrifugal force when the gripper performs a rotary motion
F = mr
Z
2
, r: Radius of rotation,
Z: Angular velocity
Confirm that F
z
is equal to or less than the allowable vertical load F
zmax
.
Moment generating around the finger due to an external force
Calculate the moments that generate in the respective directions due to the external forces F
X
, F
Y
and F
Z
.
[1] Ma moment [M
Oa
]
[2] Mb moment [M
Ob
]
[3] Mc moment [M
Oc
]
(3) Total moment generating around the finger in each direction
• Two-finger type
• Three-finger type
Confirm that the value calculated above is equal to or less than the applicable allowable load moment in
Table 1.
*Note 4
*Note 4
*Note 4