Positionneur type 8694 (régulateur de position) – Burkert Type 8694 User Manual
Page 144
144
Descriptiondusystème
5.5.
Positionneur type 8694 (régulateur de position)
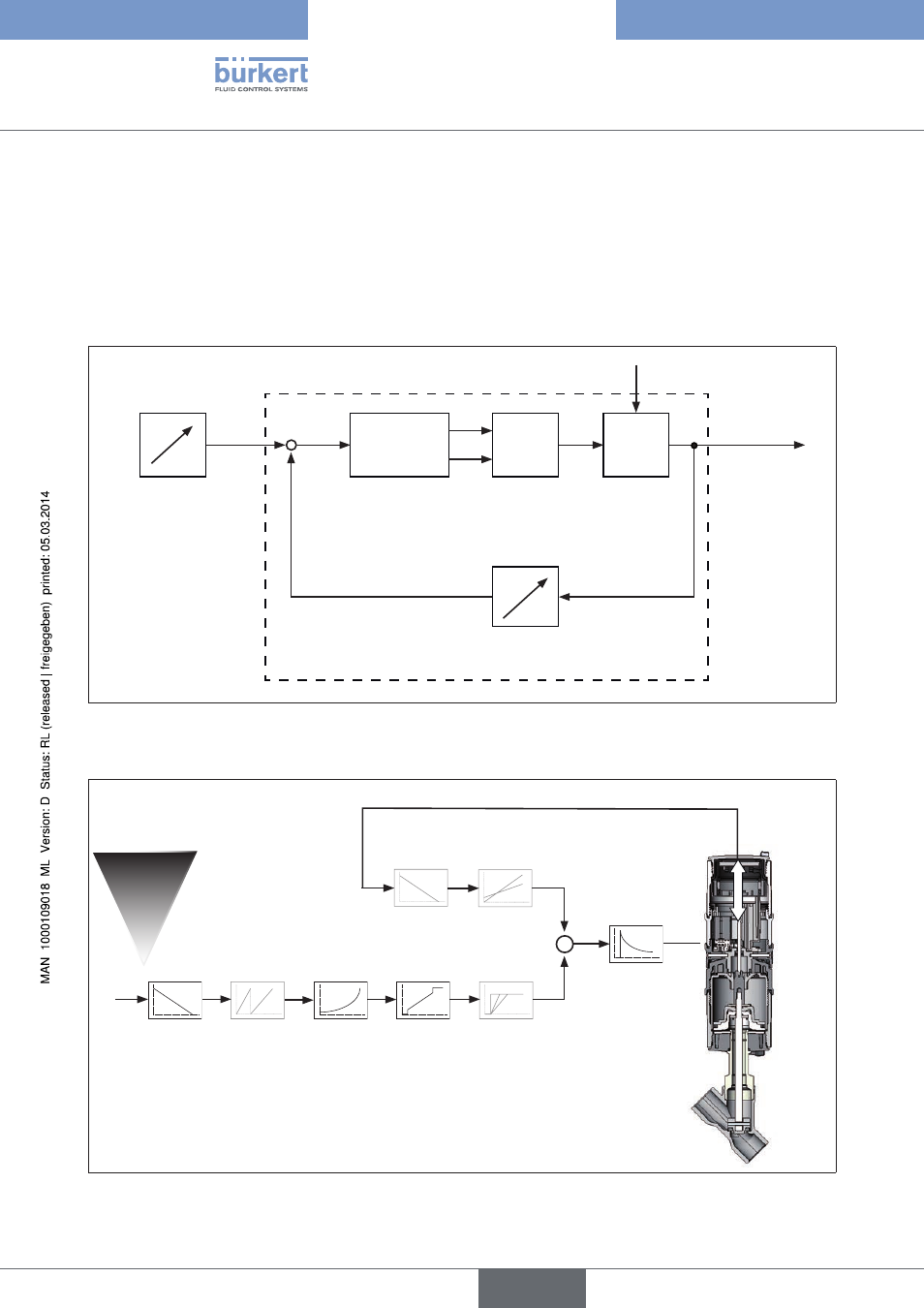
Le système de mesure de déplacement permet de détecter la position actuelle (POS) de l'actionneur pneumatique.
Le régulateur de position compare cette valeur effective de position à la valeur de consigne pouvant être prescrite
en tant que signal normalisé (CMD). En présence d'une différence de régulation (Xd1), un signal de tension PWM
(MIL) est transmis au système de réglage comme grandeur de réglage. Avec les actionneurs simple effet, et en
présence d'une différence de régulation positive, la vanne d'alimentation en air est commandée via la sortie B1. Si
la différence de régulation est négative, la vanne d'échappement est commandée via la sortie E1. De cette façon, la
position de l'actionneur est modifiée jusqu'à la différence de régulation 0. Z1 représente une grandeur perturbatrice.
Ouverture de
vanne
Vanne de
régulation
Système de
réglage
Electrovannes
Système de mesure de
déplacement
Régulateur
de position
Valeur de
consigne
de position
CMD
Xd1
B1
E1
P
K
Z1
POS
Circuit de régulation
de position
+
-
Figure 4 :
Schéma logique du régulateur de position
5.5.1.
Représentation schématique de la régulation de position
du type 8694
4 ... 20 mA
1)
0 ... 20 mA
CHARACT
SPLTRNG
2)
DIR.CMD
CUTOFF
X.TIME
2)
X.CONTROL
DBND
POS
CMD
INP
POS
CMD
DIR.ACT
2)
X.LIMIT
2)
1)
Réglage par défaut
2)
Uniquement activable avec le logiciel de communication
Figure 5 :
Représentation schématique de la régulation de position
Type 8694
français