Error management, Table 5-1 description of the error types – FUJITSU CAN-Motor Board MB91F267N User Manual
Page 90
AN07-00180-3E
- 90 -
5.2.3
Error management
CAN error management is defined in its protocol. Five types of error detection and three types of status
are used.
1. Error detection
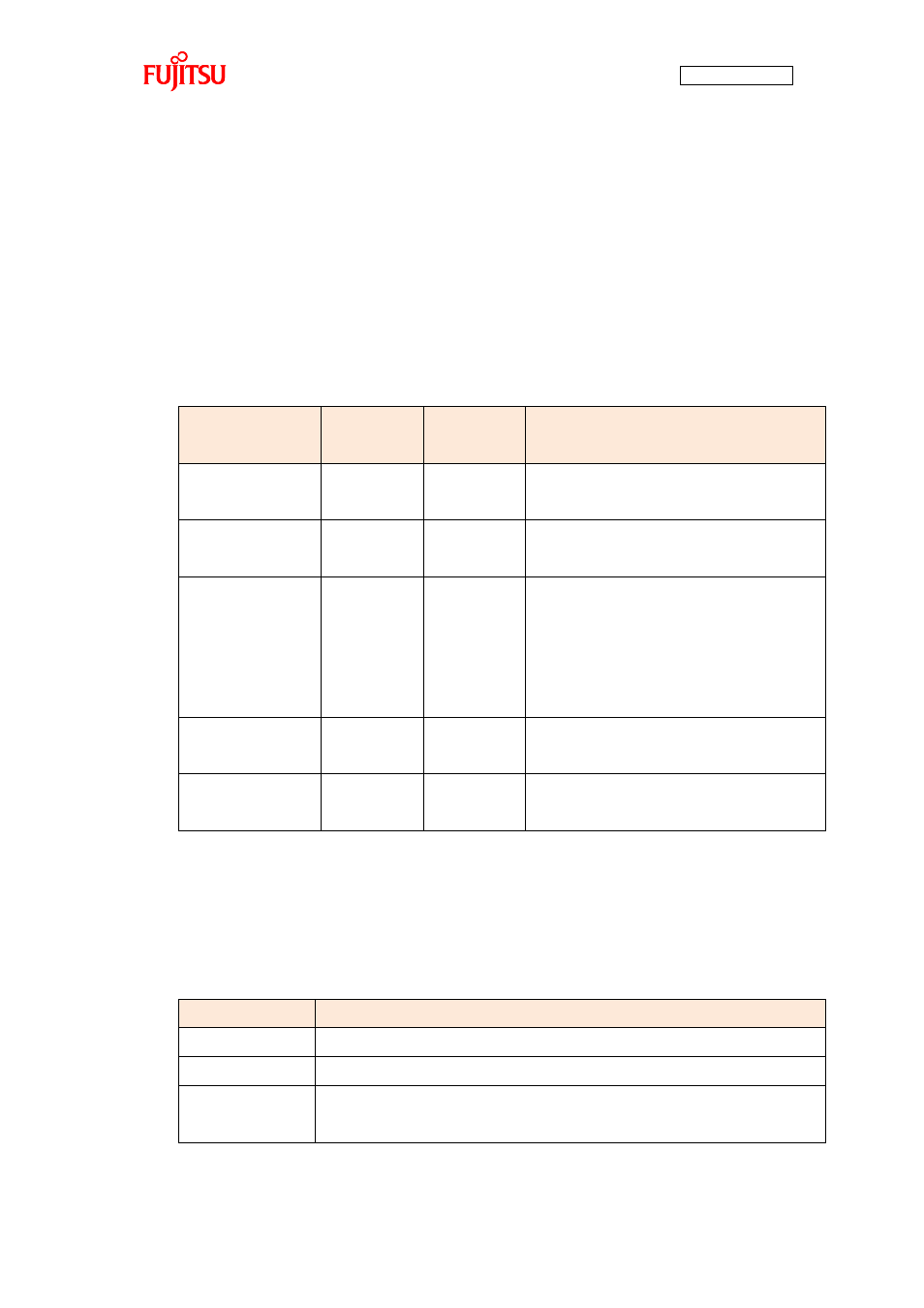
As shown in “Table 5-1 Description of the error types”, errors that can be detected depends on
whether the node is transmitting or receiving.
Table 5-1 Description of the error types
Error type
Transmitting
node
Receiving
node
Description
Bit error
○
-
Detected if there is a difference between the
transmitted data and the bus level.
ACK error
○
-
Detected
if
an
acknowledgement
to
transmission cannot be obtained.
Stuff error
-
○
Detected if bit stuffing is not applied. Bit
stuffing is to set an inverted bit by 5 bits if
the number of successive bits with the same
level is 5 or more. This prevents bits with the
same level from being successive over 6 bits.
CRC error
-
○
Detected if CRC (cyclic redundancy check)
fails on the received data.
Format error
-
○
Detected if the received data does not
confirm to any of the frame formats.
2. Statuses
Each node has error counters whose value depends on the status. The error counters of the nodes
are named TEC (transmit error count) and REC (receive error count) intending transmission and
reception. The three statuses are as described below.
Status
Description
Error active
The node is normally joining in the bus.
Error passive
The node has frequent errors so it is influencing the bus.
Bus off
The node is disconnected from the bus. To restore to the bus, the bus needs to
satisfy the restoration condition.