Table 5-4 can message ids in the sample program – FUJITSU CAN-Motor Board MB91F267N User Manual
Page 96
AN07-00180-3E
- 96 -
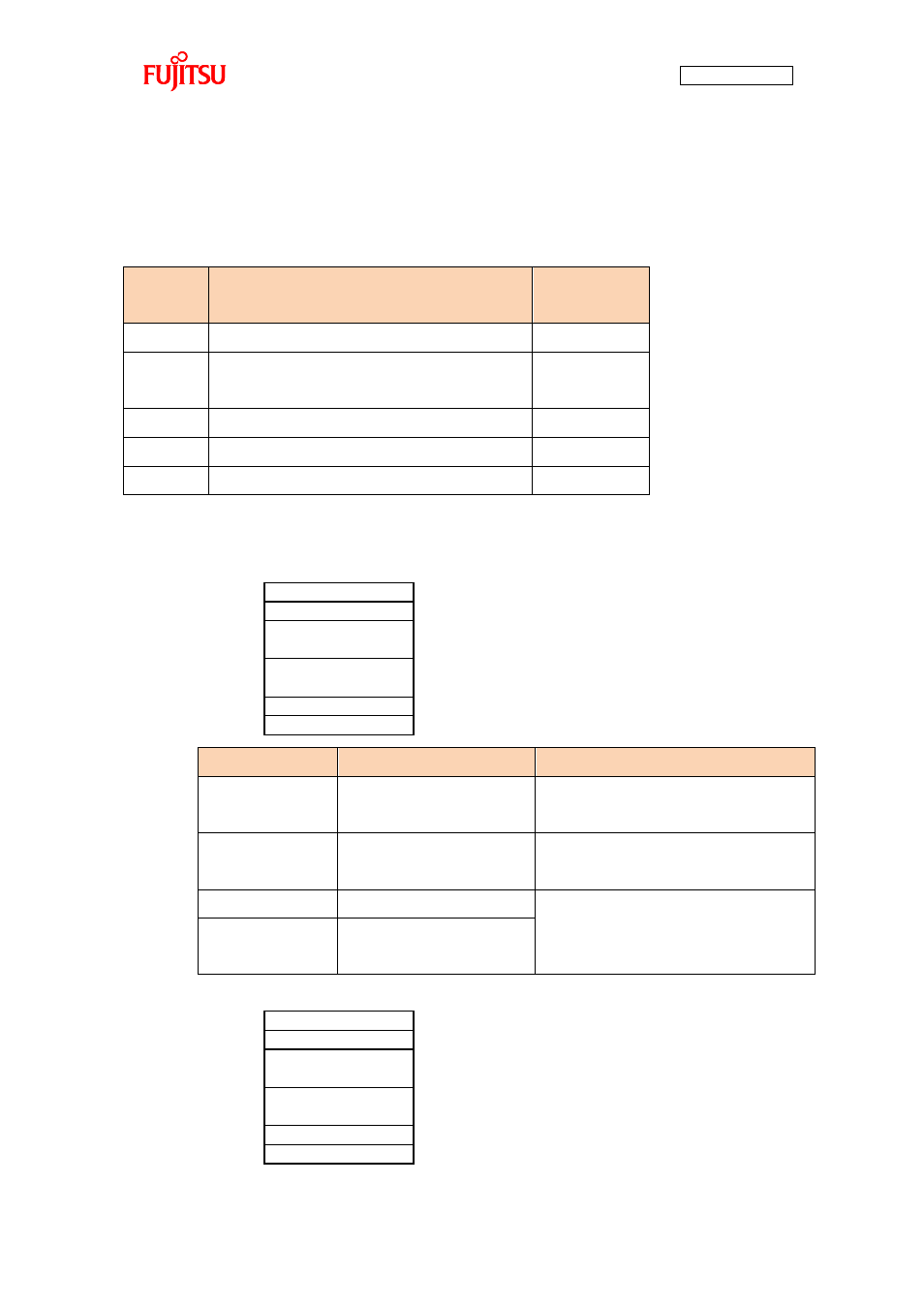
“Table 5-4 CAN message IDs in the sample program” provides a description of the message IDs used for
CAN communication.
Table 5-4 CAN message IDs in the sample program
ID
Description
Communication
direction
0x101
Motor operation start/stop command
receive
0x102
Motor operation rotation speed/Rotation
direction/Brake command
receive
0x103
Temperature sensor measurement command
receive
0x201
Motor rotation information
transmit
0x202
Temperature sensor information
transmit
Details of the IDs are as shown below.
1. ID: 0x101
Field name
Setting value
Remarks
Motor operation
command
0: Stop 1: Start
-
Motor rotation
direction
0: Clockwise 1:
Counterclockwise
-
Motor rotation speed
0 to 65535
The motor rotation speed and A/D maximum
value are used for conversion of the speed to a
percentage of 0% to 100%.
A/D maximum value
0 to 65535
2. ID: 0x102
Motor operation
command
byte 0
Motor rotation direction
Motor rotation speed
A/D maximum value
byte 1
byte 2
byte 3
byte 4
Reserved
Reserved
byte 5
byte 6
byte 7
Motor rotation direction
byte 0
Brake application
Motor rotation speed
A/D maximum value
byte 1
byte 2
byte 3
byte 4
Reserved
Reserved
byte 5
byte 6
byte 7