Arbitration, Figure 5-4 operation of the arbitration – FUJITSU CAN-Motor Board MB91F267N User Manual
Page 88
AN07-00180-3E
- 88 -
5.2.2
Arbitration
CAN employs the multi-master communication system, so any node can start communication. But, the
number of communication sessions actually allowed on one bus is only one. Each node is cyclically
checking whether the bus is the status of transmission. When there is no transmission on the bus,
communication is started, but if more than one node starts transmission, they conflict. Against this, CAN
performs arbitration to give priority to one with a lower ID for transmission. This section describes the
arbitration.
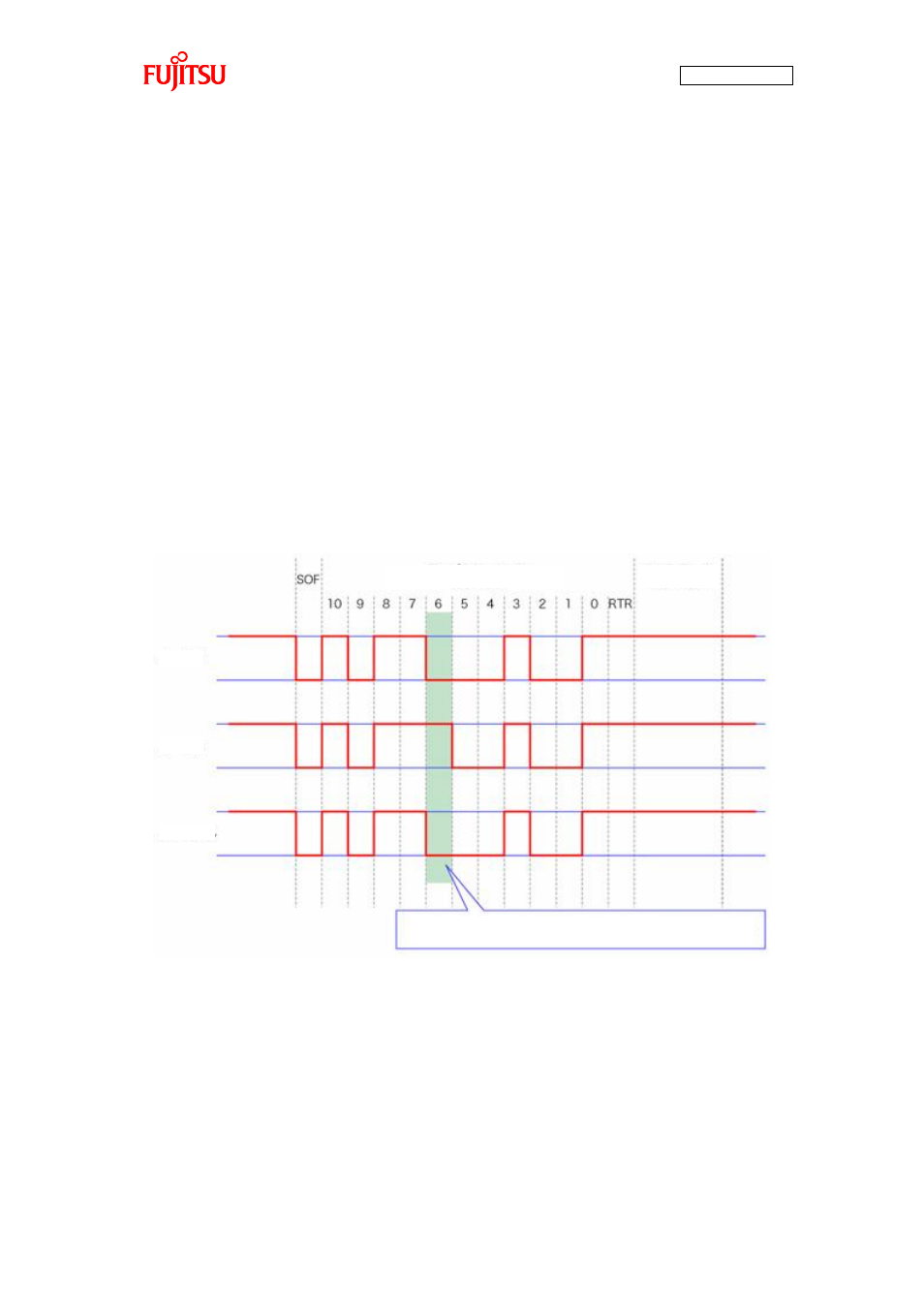
The arbitration is carried out by comparison between the ID and the bus level by bit as shown in “Figure
5-4 Operation of the arbitration”. Bit 10 to 7 of Node 1 and Node 2 are the same as the bus level. This
indicates that both Node 1 and Node 2 are transmitting signals. But, Bit 6 of Node 1 is set to “0” and that
of Node 2 is set to “1”. The bus level is “0”, so Node 2 recognizes that the frame is not of its own
communication and stops the transmission immediately. Node 1 keeps on transmitting. After Node 1 ends
its communication, Node 2 resumes transmission.
Figure 5-4 Operation of the arbitration
The bus status is determined according to the logical product of IDs, so “0” is prior to “1”. This means
that a lower ID takes priority.
A practical communication flow shown in “Figure 5-5 Example of arbitration among nodes” is as
described below. First, Node 1 and Node 2 starts transmission simultaneously. The arbitration results in
Node 1
Node 2
Bus level
Arbitration field
Control field
Node 1 is the same as the bus level, so Node 2 stops
transmission.