FUJITSU CAN-Motor Board MB91F267N User Manual
Page 64
AN07-00180-3E
- 64 -
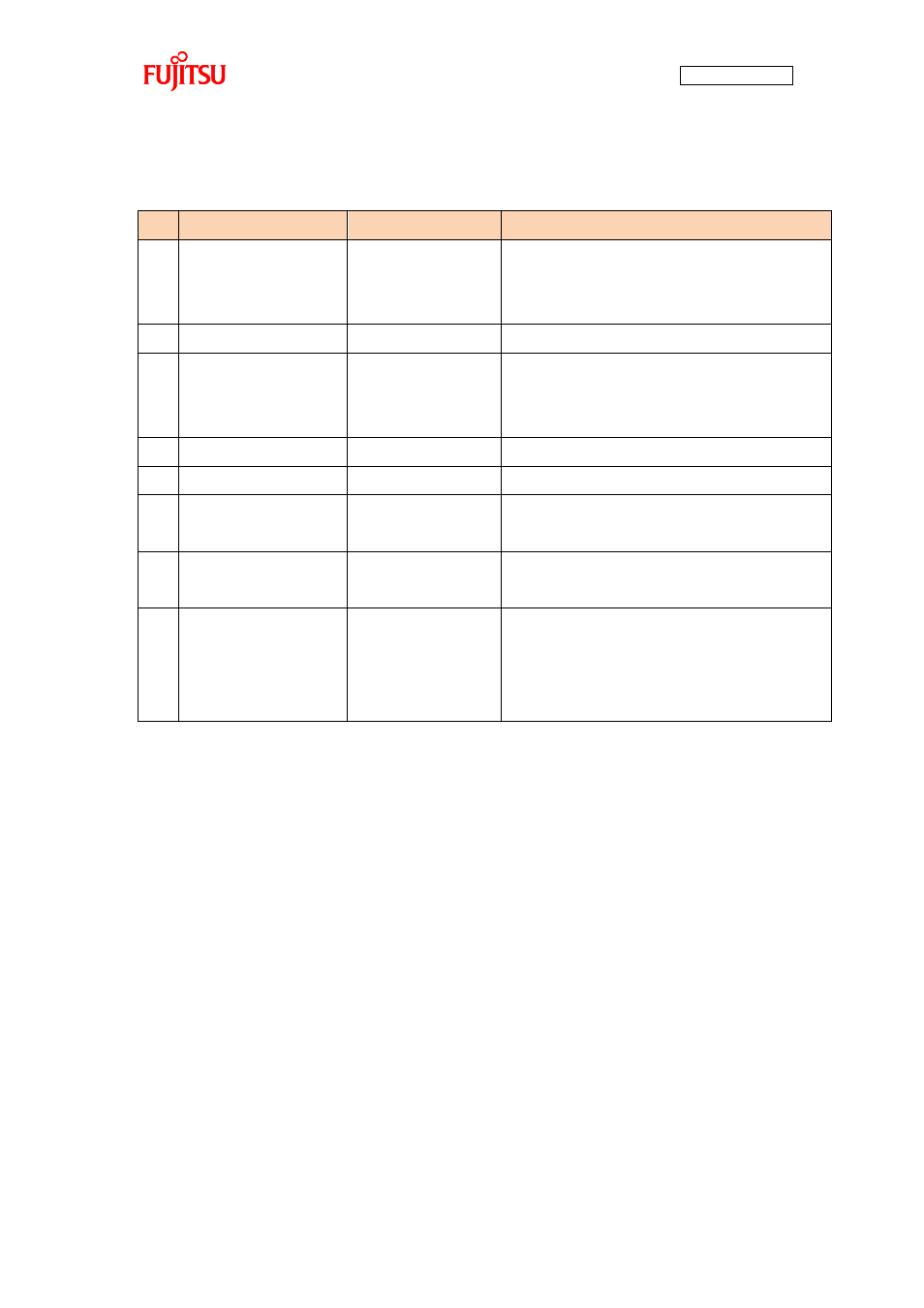
Table 3-2 CAN communication operation/Descriptions of the controls and mechanicals
No.
Name
Function
Description
(1)
Mode SW
Control
Switches between RPG mode and RUN mode.
PRG: Write a program
RUN: Run the program
(2)
Reset SW
Control
Rests the MCU when pressed.
(3)
Temperature sensor
Control
Returns the temperature measured by this temperature
sensor on a temperature measurement command in
CAN communication.
(4)
CAN transmit LED
Mechanical
Lights when a CAN transmit is performed.
(5)
CAN receive LED
Mechanical
Lights when a CAN receive is performed.
(6)
LEDs (green)
Mechanical
Indicate the status of whether the motor driver circuit is
ON/OFF.
(7)
LEDs (red)
Mechanical
Indicate the status of whether the hall elements are
ON/OFF.
(8)
BLDC motor
Mechanical
Operates according to rotation/stop by motor operation
commands. The brake, rotation direction, and rotation
speed respectively depend on motor operation
commands.
- XG Series P3NK-4452-01ENZD (614 pages)
- FPCAC14C (1 page)
- MCJ3230SS (161 pages)
- MBA3073NC (138 pages)
- T5140 (102 pages)
- T5140 (76 pages)
- MAM3367MC/MP (152 pages)
- MPC3045AH (185 pages)
- MB2142-02 (23 pages)
- MB15F86UL (6 pages)
- MHS2030AT (40 pages)
- MHW2100BS (296 pages)
- MHK2060AT (227 pages)
- Disk Drives MHK2060AT (227 pages)
- MCM3064SS (170 pages)
- Mainboard D1561 (45 pages)
- MHC2040AT (219 pages)
- D1961 (45 pages)
- DISK DRIVES MHM2100AT (231 pages)
- MHR2010AT (250 pages)
- MHZ2120BJ (320 pages)
- MCE3064AP (175 pages)
- LQFP-64P (16 pages)
- Solaris PCI GigabitEthernet 3.0 (115 pages)
- MAY2036RC (94 pages)
- MAB3091 (142 pages)
- MPE3XXXAT (191 pages)
- MHV2040AH (40 pages)
- MHW2040AC (278 pages)
- ETERNUSmgr P2X0-0202-01EN (64 pages)
- VSS Hardware Provider 2.1 (134 pages)
- MAG3182FC (61 pages)
- MAU3147NC/NP (130 pages)
- MAX3147RC (94 pages)
- MHV2160BT (296 pages)
- MHV2040AT (280 pages)
- MAW3300NC/NP (130 pages)
- DeskPower E623 (50 pages)
- MAG3182LC (133 pages)
- OPTICAL DISK DRIVES MDG3064UB (42 pages)
- MHF2021AT (225 pages)
- MHR2040AT (40 pages)
- Single Drive FTM7926FB (1 page)
- PG-FCS103 (98 pages)
- MAS3735FC (114 pages)