Yaskawa MP3200 Troubleshooting Manual User Manual
Page 70
4.2 Troubleshooting Motion Errors
Troubleshooting Motion Errors
4-20
* This applies when the SERVOPACK Parameter Auto-Write fixed parameter is set to 0 (Enabled) and the set value of the Filter
Time Constant, Acceleration Rate/Acceleration Time Constant, or Deceleration Rate/Deceleration Time Constant parameter is
changed at the same time as the movement command is set.
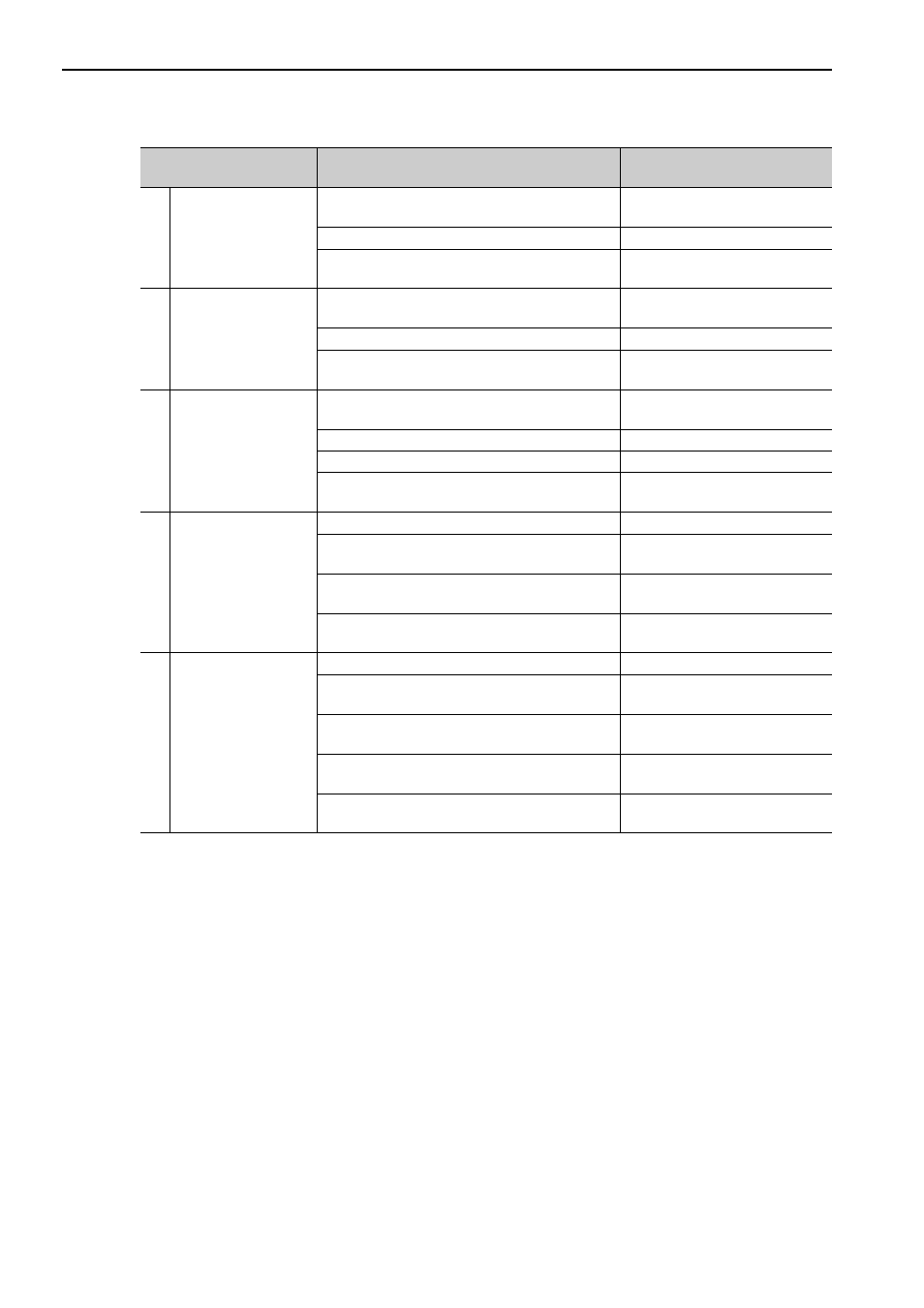
23
VELO (Issue Speed
Reference)
The command was issued for a MECHA-
TROLINK-I connection.
−
An alarm has occurred.
−
Communications are not synchronized.
A: SERVOPACK Synchronized
Communications Error
24
TRQ (Issue Torque
Reference)
The command was issued for a MECHA-
TROLINK-I connection.
−
An alarm has occurred.
−
Communications are not synchronized.
A: SERVOPACK Synchronized
Communications Error
25
PHASE (Issue Phase
Reference)
An absolute infinite-length axis is being used but
the zero point is not set.
A: Zero Point Unset
The power to the Servomotor is OFF.
A: Servo OFF
An alarm has occurred.
−
Communications are not synchronized.
A: SERVOPACK Synchronized
Communications Error
26
KIS (Change Position
Loop Integral Time)
An alarm has occurred.
−
Communications are not synchronized.
A: SERVOPACK Synchronized
Communications Error
Writing the SERVOPACK parameters was not
completed within the specified time.
A: SERVOPACK Communica-
tions Timeout Error
An A.94 or A.95 warning occurred in the SER-
VOPACK.
W: SERVOPACK Error
−
SERVOPACK param-
eter auto-write when
other movement com-
mands are executed
*
An alarm has occurred.
−
Communications are not synchronized.
A: SERVOPACK Synchronized
Communications Error
Writing the SERVOPACK parameters was not
completed within the specified time.
A: SERVOPACK Communica-
tions Timeout Error
An A.94 or A.95 warning occurred in the SER-
VOPACK.
W: SERVOPACK Error
Pulse distribution is not completed (i.e., DEN is
OFF).
−
Continued from previous page.
Motion Command Code
Reason for Command Error End
Warnings (W) and Alarms (A)
That Occur at the Same Time