Pid adjustment methods, Suppressing overshoot, Set a rapidly stabilizing control condition – Yaskawa G7 Drive User Manual
Page 320: Suppressing long-cycle vibration
Individual Functions
6-
103
PID Adjustment Methods
Use the following procedure to adjust PID while performing PID control and measuring the response waveform.
1. Set b5-01 (PID Control Mode Selection) to 1 or 2 (PID control enabled).
2. Increase b5-02 (Proportional Gain (P)) to within a range that does not vibrate.
3. Reduce b5-03 (Integral (I) time) to within a range that does not vibrate.
4. Increase b5-05 (Derivative (D) time) to within a range that does not vibrate.
PID Fine Adjustment Methods
This section explains the fine adjustment of PID after setting the PID control parameters.
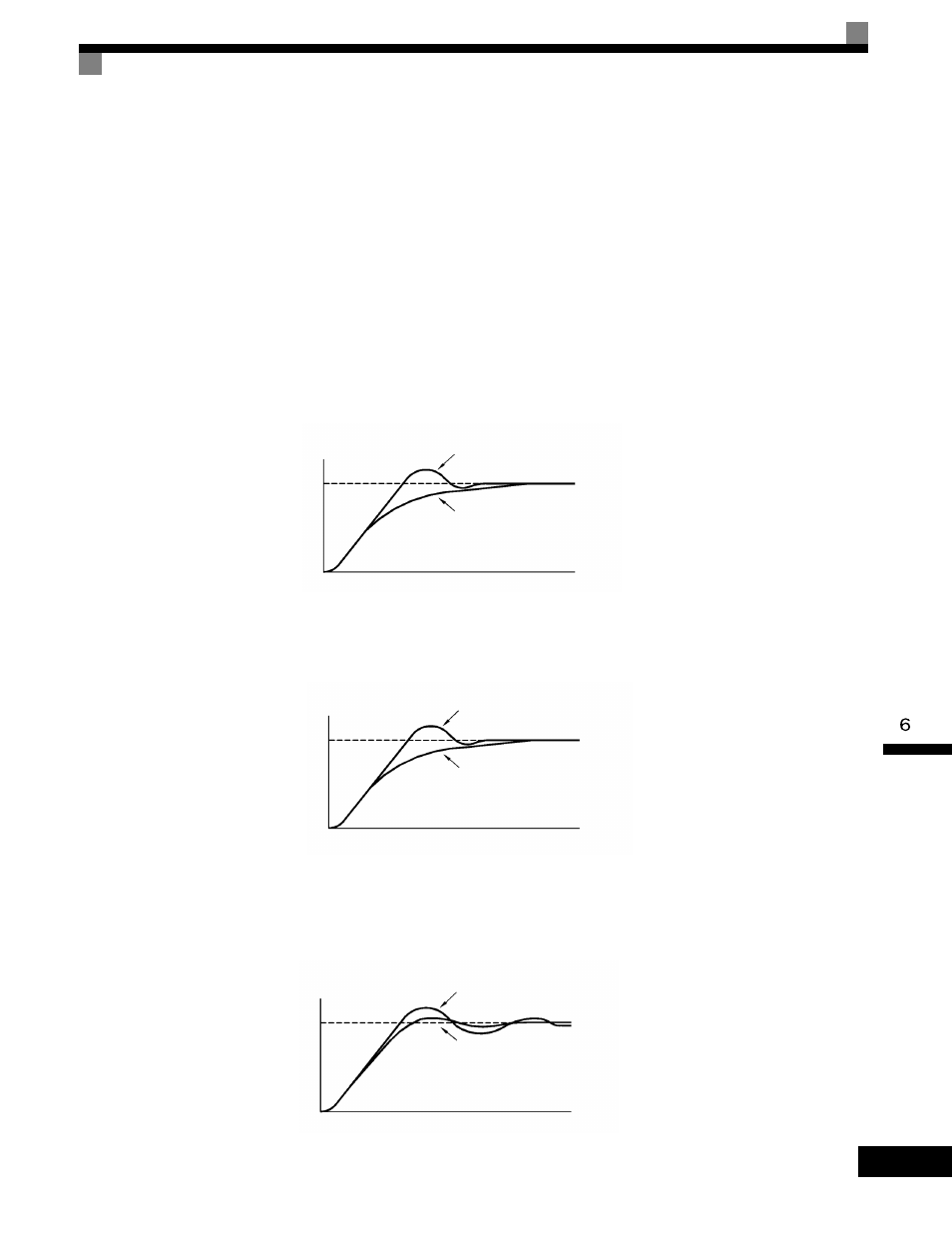
Suppressing Overshoot
If overshoot occurs, reduce derivative time (D), and increase integral time (I).
Set a Rapidly Stabilizing Control Condition
To rapidly stabilize the control even if overshoot occurs, reduce integral time (I), and lengthen derivative time (D).
Suppressing Long-cycle Vibration
If vibration occurs with a longer cycle than the integral time (I) set value, the integral operation is too strong.
Lengthen the integral time (I) to suppress the vibration.
Response
Before adjustment
After adjustment
Time
Response
Before adjustment
After adjustment
Time
Response
Before adjustment
After adjustment
Time