Yaskawa G7 Drive User Manual
Page 188
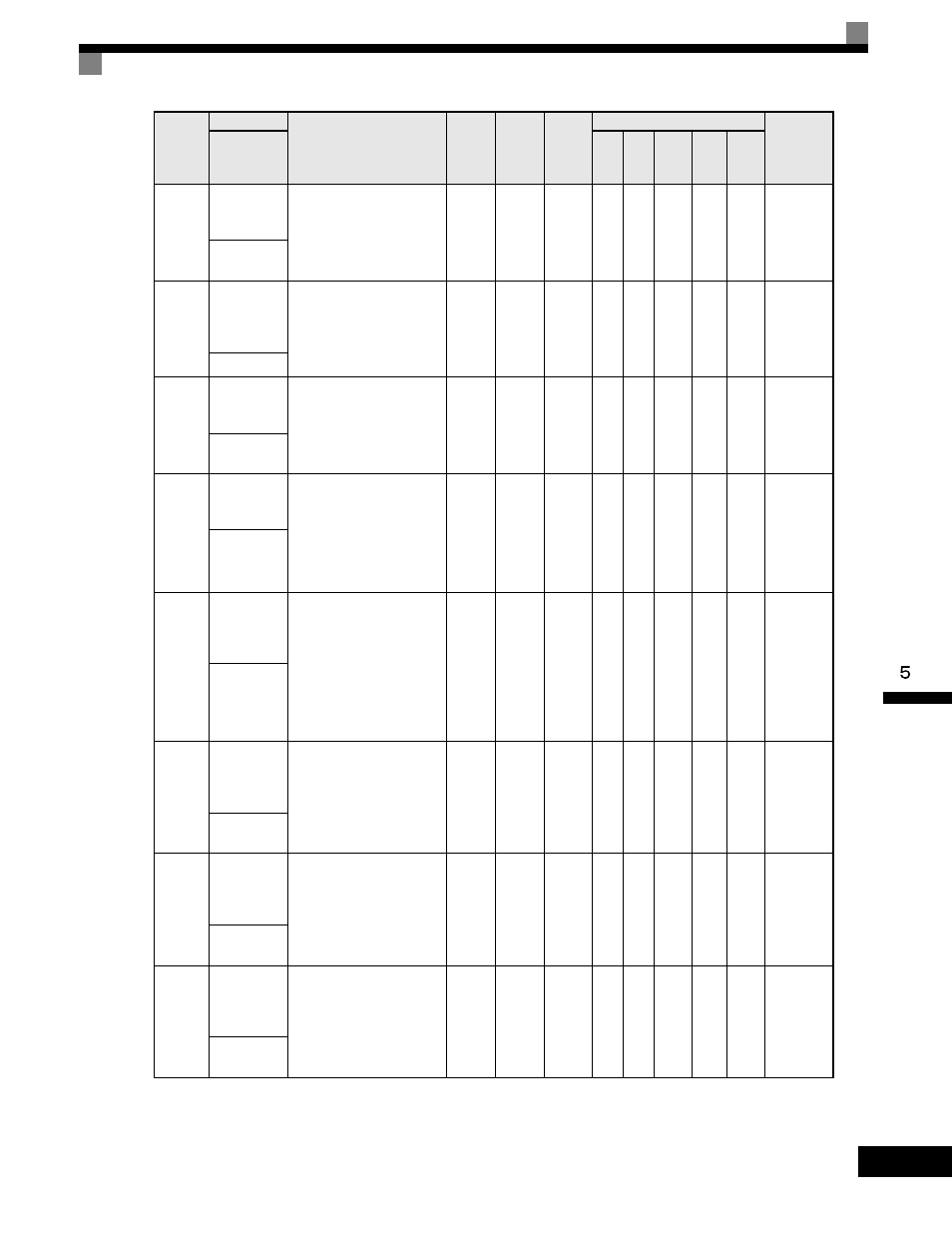
User Parameter Tables
5-
77
n4-17
Torque
Adjustment
Gain
Sets the torque adjustment
gain for low-speed power.
0.0
to
5.0
1.0
No
No
No
No
No
A
5A4H
TRQ adjust
gain
n4-18
Gain for
Feeder
Resistance
Adjustment
Sets the gain for the feeder
resistance in the speed
estimator.
0.90
to
1.30
1.00
No
No
No
No
No
A
5A5H
Feeder R gain
n4-28
Observer
Switching
Frequency 2
Sets the frequency at which
the Observer switches
between high and low speeds
during deceleration.
20
to
70
Hz
50Hz
No
No
No
No
No
A
5AFH
Speed
Change F 2
n4-29
Torque
Adjustment
Gain 2
Slowly increase the setting
value when load tolerance
rises at low speeds. If set too
high, the load tolerance will
be reduced.
Note: Adjustment is not
normally required.
0.00
to
0.40
0.10
No
No
No
No
No
A
5B4H
TRQ adjust
gain2
n4-30
Low Speed +
Regen
Stability
Coefficient 2
Set to a larger value to
stabilize the motor when
running at extremely low
speeds and/or regen. When
the setting is increased, the
motor will accelerate as the
regen load increases. When
tuning, adjust in units as large
as 0.2.
0.00
to
10.00
1.00
No
No
No
No
No
A
5B5H
LowSpd Rgn
Coef2
n4-32
Observer
Gain
Modulation
Frequency
Set the lower limit of the P-
gain modulation frequency on
the low-speed side of the
Observer (PI Controls) in
Hertz.
0.0
to
60.0
Hz
5.0Hz
No
No
No
No
No
A
5B7H
SpdEst Gain
Frq1
n4-33
Observer
Gain
Modulation
Frequency 2
Set the upper limit of the
P-gain modulation frequency
on the low-speed side of the
Observer (PI Controls) in
Hertz.
0.0
to
60.0
Hz
20.0Hz
No
No
No
No
No
A
5B8H
SpdEst Gain
Frq2
n4-34
Observer
Gain
Modulation
Rate
Sets the percentage of
modulation allowed for
P-gain on the low-speed side
of the Observer (PI Controls).
50.0
to
100.0%
100.0%
No
No
No
No
No
A
5B9H
SpdEst Gain
Rate
Parameter
Number
Name
Description
Setting
Range
Factory
Setting
Change
during
Operation
Control Methods
MODBUS
Register
Display
V/f
V/f
with
PG
Open
Loop
Vector
1
Flux
Vector
Open
Loop
Vector
2