21 slip compensation, Slip compensation -31 – Yaskawa J7 Drive User Manual
Page 66
5-31
n65
: Motor No-Load Current
Factory setting: See Table A3-1
Range: 0 to 99%
Motor no-load current (
n65
) is set as a percentage of motor full-load current (
n32
). It is used as
shown in the slip compensation equation.
n67
: Slip Compensation Primary Delay
Factory setting:
2.0
sec.
Time Constant
Range: 0.0 to 25.5 sec.
Parameter
n67
can be increased to improve stability or decreased to improve response to load
changes.
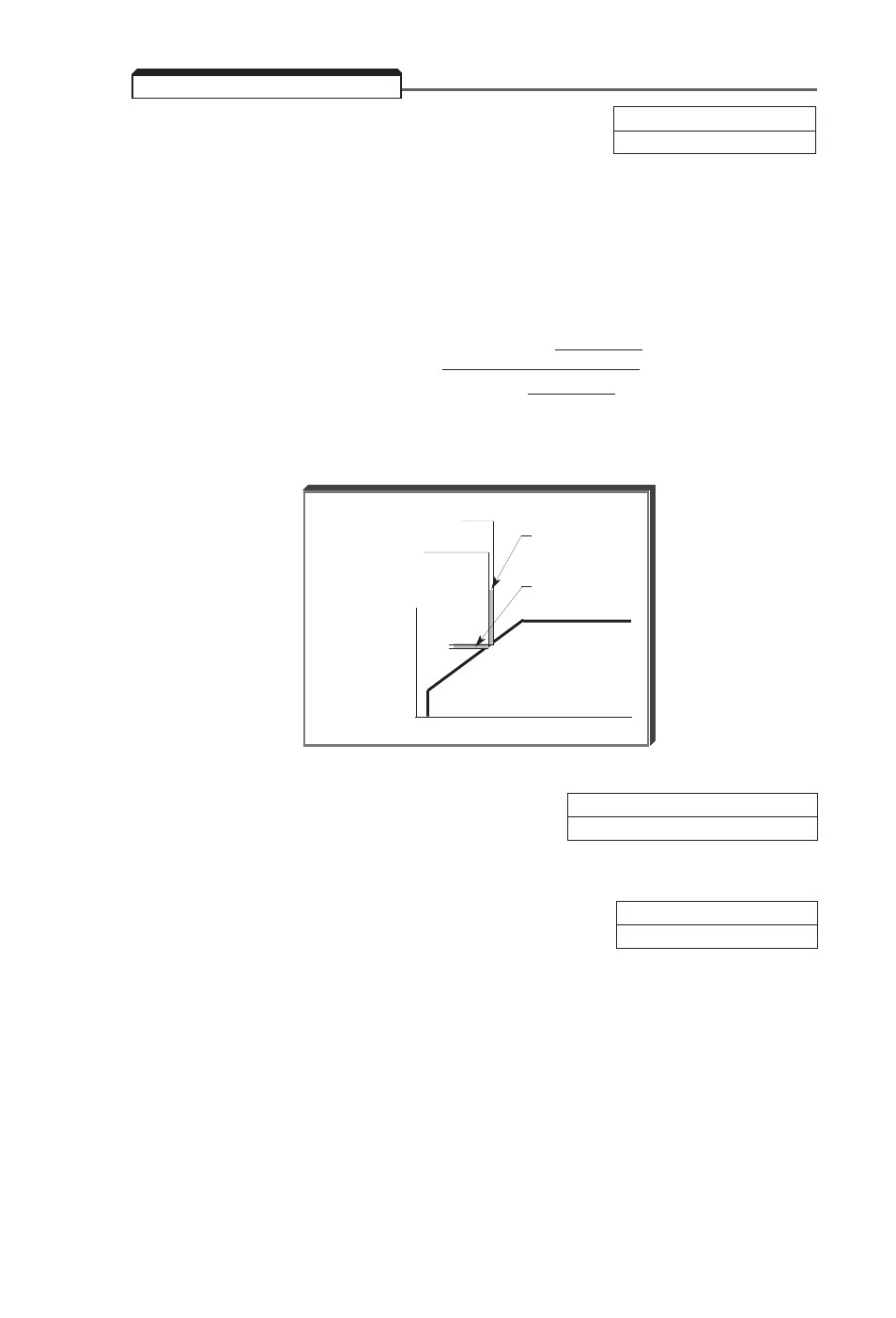
5.21 SLIP COMPENSATION
V
f
46.35 Hz actual output
1.35 H
frequency boost
corresponding
voltage boost
45 Hz command
n66
: Slip Compensation Gain
Factory setting:
0.0
Range: 0.0 to 2.5
Slip compensation is used to increase motor speed to account for slip; the Drive accomplishes this
by automatically boosting output frequency, with a corresponding boost in output voltage.
The slip compensation gain (
n66
) determines how much compensation frequency is added. If using
the Drive in Open Loop Vector, typically no adjustment is necessary. The equation below illustrates
how the compensation frequency is generated.
NOTE: A slip compensation gain setting of 0.0 disables slip compensation.
(n65 * n32)
Compensation Frequency
=
Output Current
–
100
*
n64 * n66
n32 –
(n65 * n32)
100
Slip Compensation Equation