Moniteur 50 Series SMART Positioners User Manual
Page 89
Operation
4-27
Positioner SIPART PS2/SIPART PS2 PA
C79000-G7476-C150–01
1
1
0
0
0
1
s. a.
good (cascade), initialization confirmed
1
1
0
0
1
0
s. a.
good (cascade), initialization requested
1
1
0
0
1
1
s. a.
good (cascade), not requested
1
1
0
1
1
0
s. a.
good (cascade), local operation has prior-
ity
1
1
0
1
1
1
s. a.
good (cascade), device is in failsafe posi-
tion
1
1
1
0
0
0
s. a.
good (cascade), go into failsafe position
(command)
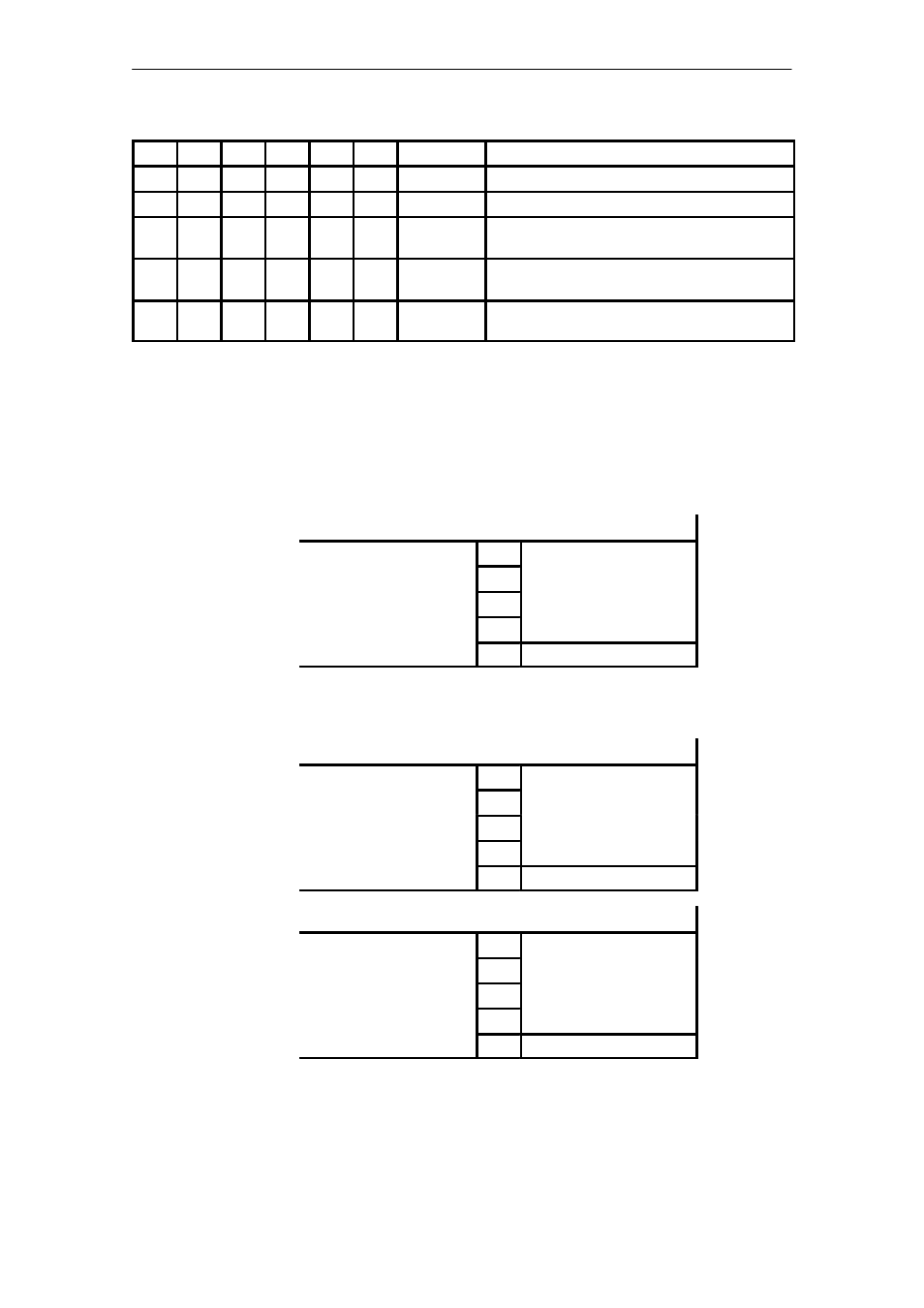
Possible combinations of useful data and position in the address space
For communication of cyclic useful data between the master and the
SIPART PS2 PA positioner you can select a combination of values dur-
ing configuration:
Setpoint
Output (master view)
Initial address
0
1
SP –
2
floating–point number
3
4
SP – status
Remote cascade output, remote cascade input
Input (master view)
Initial address
0
1
RCAS_OUT –
2
floating–point number
3
4
RCAS_OUT – status
Output (master view)
Initial address
0
1
RCAS_IN –
2
floating–point number
3
4
RCAS_IN – status
SP
RCAS_OUT,
RCAS_IN