Rockwell Automation 8720MC Drives Integration Manual User Manual
Page 185
Publication 8720MC-IN002A-EN-P — December 2002
Programming Parameters
C-73
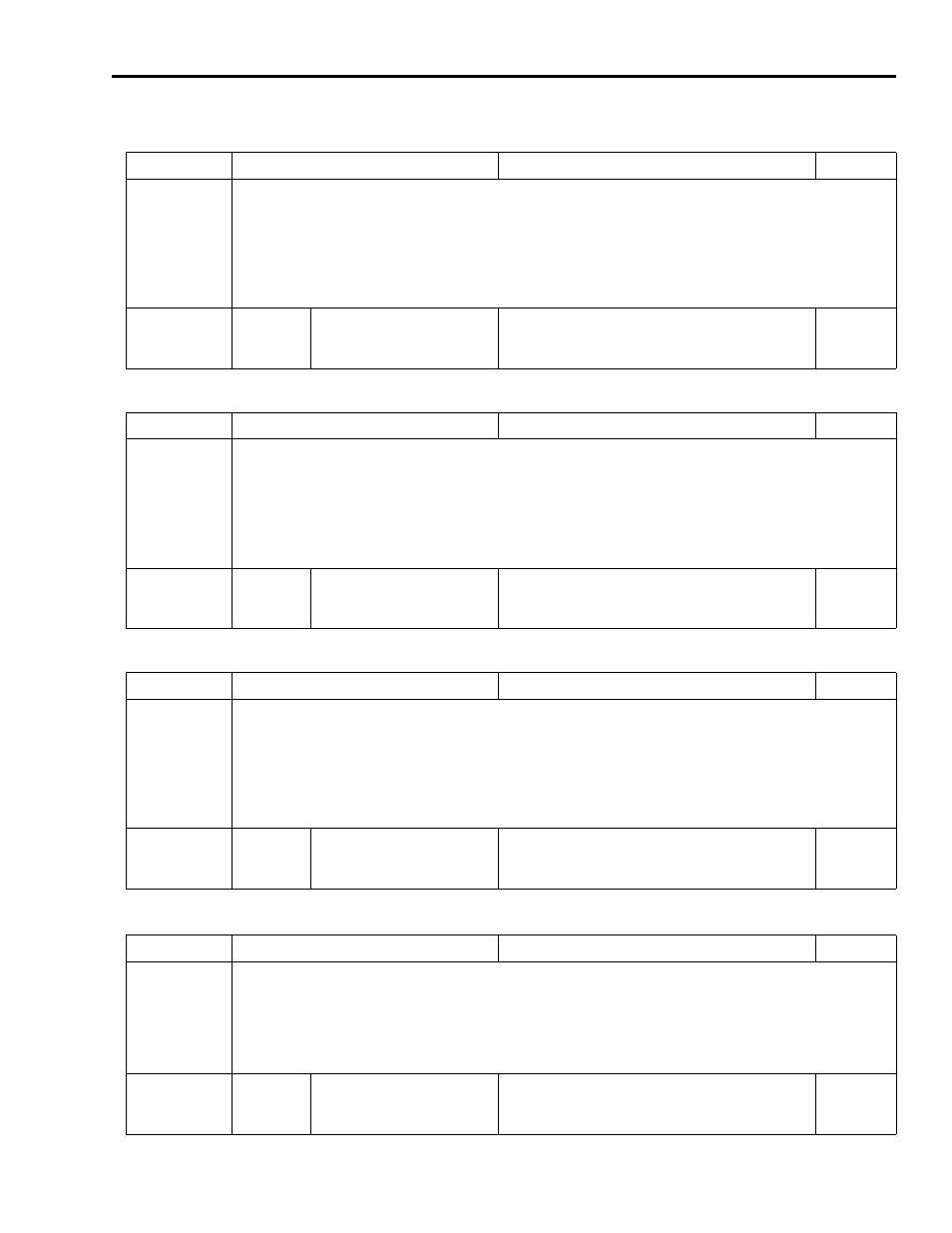
Name: X2-Rotor_Leakage
Data Type: Unsigned Integer
R/W
Parameter No.
791
File:
Motor/Drive/
Fdbk
Group:
Motor Data
Description: This parameter defines the per unit asynchronous motor (8720SM) rotor leakage reactance @ base
frequency, phase to neutral. This is set to zero for synchronous (MPL-B8xxx/-B9xxx) motors.
Default:
per motor
Length
2 bytes
Minimum/Maximum
Min.
≥ 0
Max.
≤ +30.000
Scaling Resolution
10
-3
Units
%
Name: Mtr_Mag_Current
Data Type: Unsigned Integer
R/W
Parameter No.
792
File:
Motor/Drive/
Fdbk
Group:
Motor Data
Description: This parameter defines the per unit asynchronous (8720SM) motor magnetizing current as a ratio to
the continuous current. This is set to zero for synchronous (MPL-B8xxx/-B9xxx) motors.
Default:
per motor
Length
2 bytes
Minimum/Maximum
Min.
≥ 0
Max.
≤ +100.0
Scaling Resolution
10
-1
Units
%
Name: Mtr_Slip_Freq
Data Type: Unsigned Integer
R/W
Parameter No.
793
File:
Motor/Drive/
Fdbk
Group:
Motor Data
Description: This parameter is the asynchronous (8720SM) motor slip frequency. This is set to zero for
synchronous (MPL-B8xxx/-B9xxx) motors.
Default:
Length
2 bytes
Minimum/Maximum
Min.
≥ 0
Max.
≤ +100.00
Scaling Resolution
10
-2
Units
rad/sec
Name: Pos_Bandwidth
Data Type: Unsigned Integer
R/W
Parameter No.
986
File:
Control
Group:
Position
Description: This parameter allows access to the position loop bandwidth.
Default:
10
Length
2 bytes
Minimum/Maximum
Min.
≥ 0
Max.
≤ +10,000
Scaling Resolution
1 = 1 rad/s
Units
rad/s