Rockwell Automation 8720MC Drives Integration Manual User Manual
Page 166
Publication 8720MC-IN002A-EN-P — December 2002
C-54
Programming Parameters
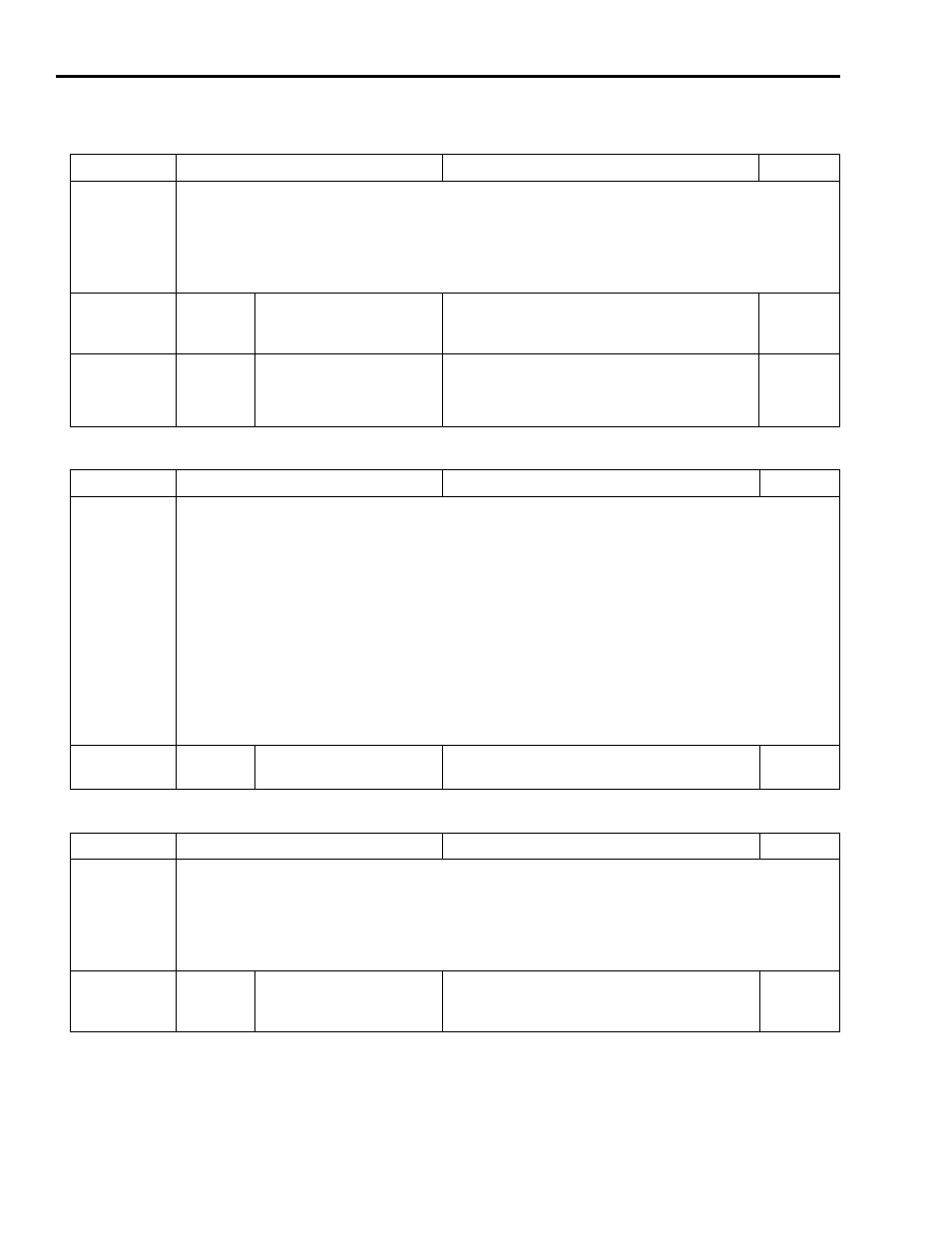
Name: -Dyn_Iq_Limit
Data Display: Signed Decimal
R/W
Parameter No.
536
File:
Control
Group:
Torque
Description: The negative dynamic Iq limit defines the maximum negative torque producing current available in
the motor/inverter system. A value of -100% is defined as the motor or drive rated current, whichever is less. This
value can change dynamically based on peak capability, motor 12T fold back protection, inverter I
2
T fold back
protection, user torque limits, or bus voltage headroom limits. Related to this, parameter 520 indicates the source
of real time limits in the system described above.
Default:
0.0
Length
2 bytes
SCANport Min/Max
Min.
≥ -1000.0
Max.
≤ +1000.0
SCANport Scaling Resolution
1=.1%
Units
%
Default:
0
Length
2 bytes
SERCOS/DPI Min/Max
Min.
≥ -2
15
Max.
≤ 0
SERCOS/DPI Scaling Resolution
Scaling type: parameter 86
Scaling factor: parameter 93
Scaling exponent: parameter 94
Units
parameter
86
Name: ATune_Select
Data Type: Bit Pattern
R/W
Parameter No.
541
File:
Procedure
Group:
Auto Tune
Description: The 8720MC supports auto tuning. Parameter 541 initiates the auto tune cycle procedure command.
This cycle measures the auto tune inertia and auto tune friction by accelerating the motor up to the auto tune
velocity at the auto tune current. The gains are also calculated based on the auto tune information. For the servo
loop parameter set selected auto tuning will calculate: “Vel_Prop_Gain_n”, “Vel_Int_Time_n”, “System_Accel_n”
and “Torq_Lowpas_Frqn”. It will also calculate parameter 693, “Auto_Ref_Offset” to zero the analog command
reference.
The structure of Auto tune Select is:
Bits 3-0
0000 = Idle - The auto tune system can be used
0001 =
0010 =
0011 = Done -> Idle - Auto tune has completed, set to IDLE
01xx = Executing - Auto tuning in process
1xxx = Error - An error has occurred in the auto tune procedure
Default:
0
Length
2 bytes
Minimum/Maximum
N/A
Scaling Resolution
N/A
Units
N/A
Name: ATune_Torq_Limit
Data Type: Decimal
R/W
Parameter No.
542
File:
Procedure
Group:
Auto Tune
Description: Parameter 542 specifies the motor torque used while an auto tuning cycle is executed
Default:
100%
Length
2 bytes
Minimum/Maximum
Minimum Input:
≥ 0
Maximum Input:
≤ +100.0
Scaling Resolution
1 = .1% motor current
Units
%
Execute - Initiates the auto tune process