Rockwell Automation 8720MC Drives Integration Manual User Manual
Page 157
Publication 8720MC-IN002A-EN-P — December 2002
Programming Parameters
C-45
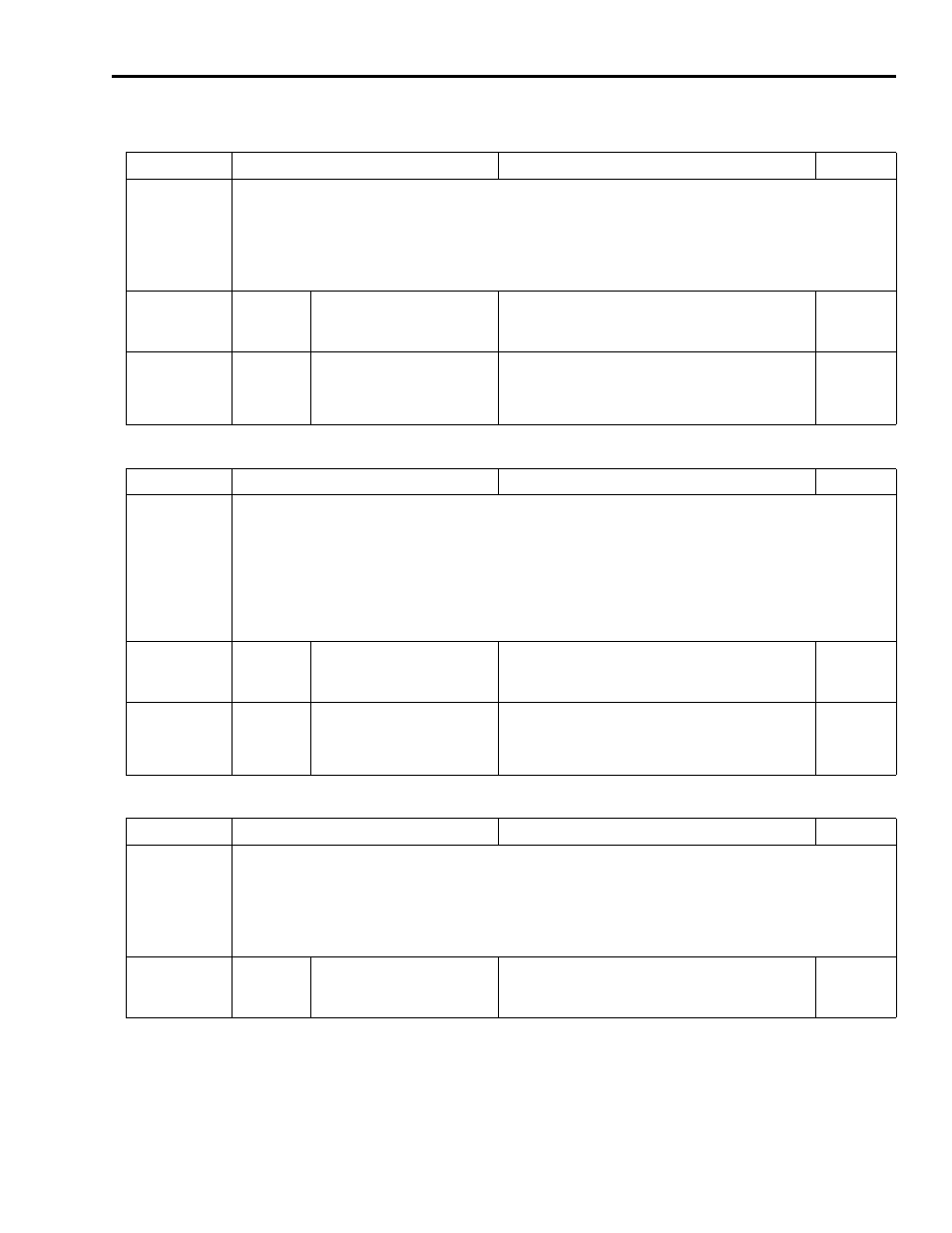
Name: Posn_Velocity
Data Display: Decimal
R/W
Parameter No.
259
File:
LInear list
Group:
LInear list
Description: Positioning Velocity. The “positioning velocity” is used in the “drive resident position interpolation”
operation mode as the positioning velocity during a DPI or SERCOS commanded change in target position,
Parameter 258
Default:
1000
Length
2 bytes
SCANport Min/Max
Min.
≥ 0
Max.
≤ +30,000
SCANport Scaling Resolution
1 rev/min, 0 to +30,000
Units
RPM
SERCOS
Default:
1000
Length
4 bytes
SERCOS/DPI Min/Max
Min.
≥ 0
Max.
≤ +2
31
- 1
SERCOS/DPI Scaling Resolution
Scaling type parameter 160
Scaling factor parameter 161
Scaling exponent parameter 162
Units
parameter
160
Name: Posn_Acc_Rate
Data Display: Decimal
R/W
Parameter No.
260
File:
Control,
Procedure
Group:
Acceleration,
Orient
Description: Positioning acceleration. The “positioning acceleration” is used in the “drive resident interpolation”
operation mode as the rate to accelerate to and decelerate from the positioning velocity (parameter 222) during an
orient procedure request (parameter 152). This acceleration rate is also used with SERCOS or DPI initiated
positioning moves to “Target Position”, parameter 258.
Default:
100
Length
2 bytes
SCANport Min/Max
Min.
≥ 0
Max.
≤ +65535
SCANport Scaling Resolution
1 rad/sec
2
Units
Rad/Sec
2
SERCOS
Default:
Length
4 bytes
SERCOS/DPI Min/Max
Min.
≥ 0
Max.
≤ +2
31
- 1
SERCOS/DPI Scaling Resolution
Scaling type parameter 160
Scaling factor parameter 161
Scaling exponent parameter 162
Units
parameter
160
Name: Speed_Window_%
Data Display: Decimal
R/W
Parameter No.
272
File:
Status/Faults
Group:
Setup
Description: Velocity window percentage. The velocity window percentage refers to a percentage of the “Velocity
command value” (parameter 36). See parameter 330 for additional information. If the velocity feedback value
(parameter 40) is found to be within a window of the velocity command defined by this percentage, the drive will
set the status
““n feedback = n command” (parameter 330). This parameter serves the same function as parameter 157 but is
expressed as a % rather than RPM
Default:
1.00
Length
2 bytes
Minimum/Maximum
Min.
≥
Max.
≤ 655.35
Scaling Resolution
0.01
Units
%