Rockwell Automation 8720MC Drives Integration Manual User Manual
Page 142
Publication 8720MC-IN002A-EN-P — December 2002
C-30
Programming Parameters
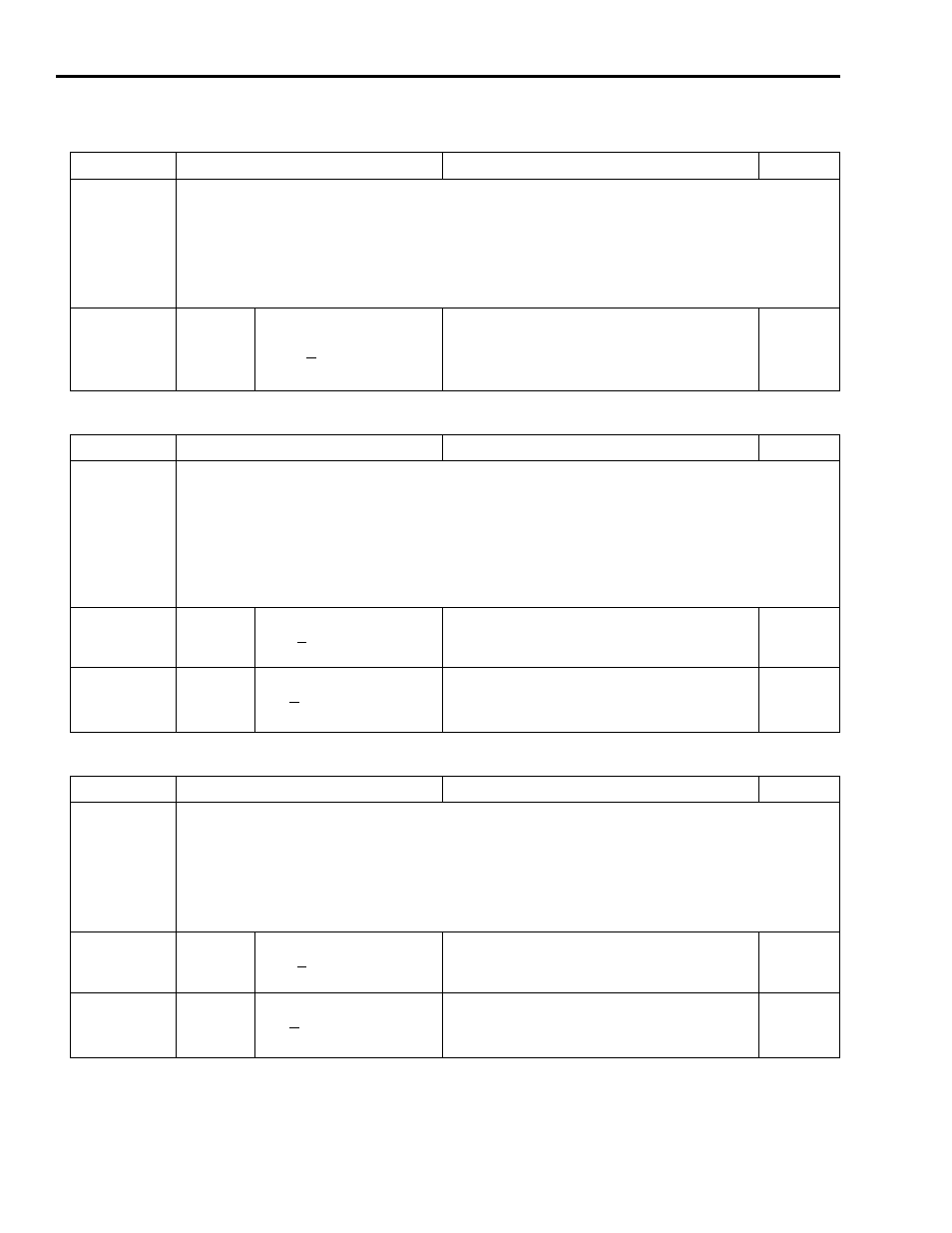
Name: Mtr_Cont_Current
Data Display: Decimal
R/W
Parameter No.
111
File:
Motor/Drive/
Fdbk
Group:
Motor Data
Description: The motor continuous stall current is the current at which the motor produces the continuous
standstill torque according to the motor spec sheet. For all motors except for asynchronous motors, this
parameter is used as a reference for all torque data and for determining motor-related current values. This
parameter is ignored for induction motors therefore it does not apply to 8720SM motors.
Default:
null
Length
4 bytes
Minimum/Maximum
Min.
> 0
Max.
≤ 1000.0
SERCOS Scaling Resolution
1 = .1 amps
Units
amps
Name: Drive_Cont_Amps
Data Display: Decimal
R/W
Parameter No.
112
File:
Motor/Drive/
Fdbk
Group:
Drive Data
Description: The amplifier rated current is equal to the allowable continuous current of the drive unit. This
parameter is determined by the drive and can’t be changed.
Default:
From drive
amplifier
Length
2 bytes
SCANport Min/Max
Min. > 0
Max.
≤ 1000.0
SCANport Scaling Resolution
1 = .1 amps
Units
amps
Default:
From drive
amplifier
Length
4 bytes
SERCOS/DPI Min/Max
Min. > 0
Max.
≤ 2
32
- 1
SERCOS/DPI Scaling Resolution
1 = .001 amps
Units
amps
Name: Max_Mtr_Speed
Data Display: Integer
R/W
Parameter No.
113
File:
Motor/Drive/
Fdbk
Group:
Motor Data
Description: The maximum motor speed is the maximum rated operating speed of the motor. With the standard
8720SM motors this value is stored in the motor encoder. If this value is exceeded by 20% an overspeed fault will
disable the drive. Parameter 129, “A-B Faults”, bit 15 will be set true.
Default:
From motor
encoder
Length
2 bytes
SCANport Min/Max
Min. > 0
Max.
≤ 30,000
SCANport Scaling Resolution
1 = 1 rpm
Units
rpm
Default:
From motor
encoder
Length
4 bytes
SERCOS/DPI Min/Max
Min. > 0
Max.
≤ 2
32
- 1
SERCOS/DPI Scaling Resolution
10
-4
Units
min
-1