Rockwell Automation 8720MC Drives Integration Manual User Manual
Page 162
Publication 8720MC-IN002A-EN-P — December 2002
C-50
Programming Parameters
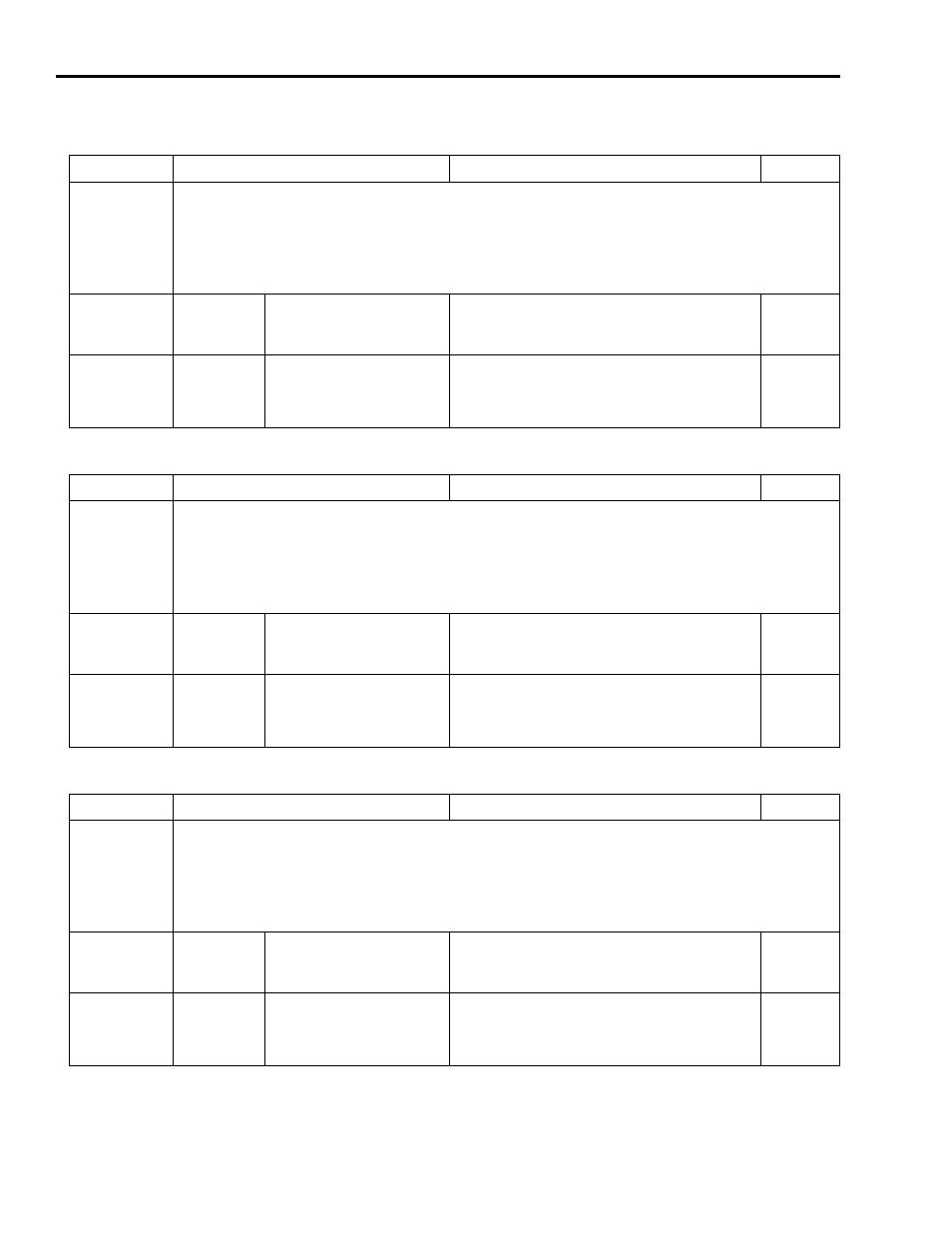
Name: Vel_Integ_Err
Data Display: Signed Decimal
R
Parameter No.
516
File:
Control
Group:
Velocity
Description: This parameter contains the velocity loop integral gain multiplied by the integrator. This is the
integrator’s contribution to the acceleration command.
Default:
65535
Length
2 bytes
SCANport Min/Max
Min.
≥ 0
Max.
≤ 65535
SCANport Scaling Resolution
1 = 1rad/sec2
Units
rad/sec
2
Default:
0.0
Length
4 bytes
SERCOS/DPI Min/Max
Min.
≥ -2
31
Max.
≤ +2
31
- 1
SERCOS/DPI Scaling Resolution
Scaling type: parameter 160
Scaling factor: parameter 161
Scaling exponent: parameter 162
Units
parameter
160
Name: Id_Reference
Data Display: Signed Decimal
R
Parameter No.
517
File:
Control
Group:
Torque
Description: This parameter displays the present level of the Id current reference for the axis.
Default:
65535
Length
2 bytes
SCANport Min/Max
Min.
≥ 0
Max.
≤ 65535
SCANport Scaling Resolution
1 = 1rad/sec2
Units
rad/sec
2
Default:
0.0
Length
4 bytes
SERCOS/DPI Min/Max
Min.
≥ 0
Max.
≤ 10,000
SERCOS/DPI Scaling Resolution
Scaling type: parameter 160
Scaling factor: parameter 161
Scaling exponent: parameter 162
Units
parameter
160
Name: Drive Utilized
Data Display: Signed Decimal
R
Parameter No.
518
File:
Mtr/Drive/Fdbk
Group:
Drive Data
Description: This parameter displays the present level of the current output to the motor as a percent of drive
rated.
Default:
65535
Length
2 bytes
SCANport Min/Max
Min.
≥ 0
Max.
≤ 65535
SCANport Scaling Resolution
1 = 1rad/sec2
Units
rad/sec
2
Default:
0.0
Length
4 bytes
SERCOS/DPI Min/Max
Min.
≥ 0
Max.
≤ 1000
SERCOS/DPI Scaling Resolution
Scaling type: parameter 160
Scaling factor: parameter 161
Scaling exponent: parameter 162
Units
parameter
160