Rockwell Automation 8720MC Drives Integration Manual User Manual
Page 153
Publication 8720MC-IN002A-EN-P — December 2002
Programming Parameters
C-41
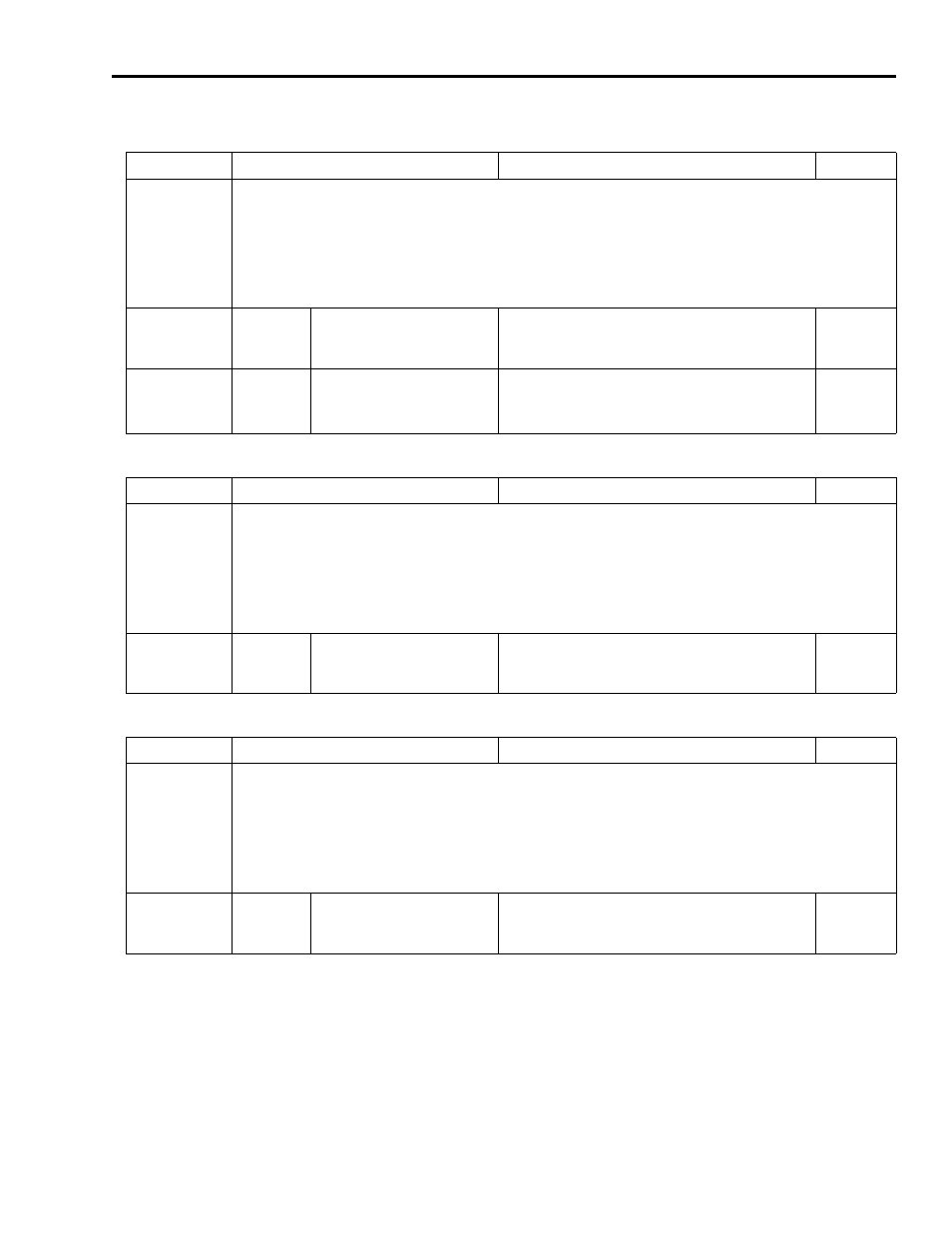
Name: Mtr_Cont_Current
Data Display: Decimal
R/W
Parameter No.
196
File:
Motor/Drive/
Fdbk
Group:
Motor Data
Description: Motor rated current. The motor rated current is the current at which the motor produces the rated
torque according to the motor spec sheet. For all asynchronous motors, this parameter is used as a reference for
all torque data and for determining motor related current values.
Analog Default:
Motor encoder
Length
2 bytes
SCANport Min/Max
Min.
≥ 0
Max.
≤ +1000.0
SCANport Scaling Resolution
1 = .1 amp
Units
amp
Default:
Motor encoder
Length
4 bytes
SERCOS/DPI Min/Max
Min.
≥ 0
Max.
≤ +2
31
- 1
SERCOS/DPI Scaling Resolution
1 = .001 amp
Units
amp
Name: Drive_On _Delay
Data Display: Decimal
R/W
Parameter No.
206
File:
Motor/Drive/
Fdbk
Group:
Brake
Description: Drive on delay time. When "drive on" and "drive enable" are set (bits 14 and 15 of the SERCOS
master control word) torque is activated at once, but the drive follows the command values after this waiting time
has elapsed. In the analog configuration this delay occurs after the drive enable input is energized. This allows the
drive time to develop holding torque before energizing the release brake solenoid.
Default:
0
Length
2 bytes
Minimum/Maximum
Min.
≥ 0
Max.
≤ +6,553.5
Scaling Resolution
1 = .1 msec
Units
msec
Name: Drive_Off _Delay
Data Display: Decimal
R/W
Parameter No.
207
File:
Motor/Drive/
Fdbk
Group:
Brake
Description: Drive off delay time. After "drive off" (bit 15 of the SERCOS master control word) is reset and
nfeedback = 0 (parameter 124) is reached, the torque remains activated in the drive until this waiting time is
elapsed. In the analog configuration this delay occurs after the zero speed output is energized. This allows the
drive time to develop holding torque before de energizing the release brake solenoid.
Default:
0
Length
2 bytes
Minimum/Maximum
Min.
≥ 0
Max.
≤ +6,553.5
Scaling Resolution
1 = .1 msec
Units
msec