Rockwell Automation 8720MC Drives Integration Manual User Manual
Page 159
Publication 8720MC-IN002A-EN-P — December 2002
Programming Parameters
C-47
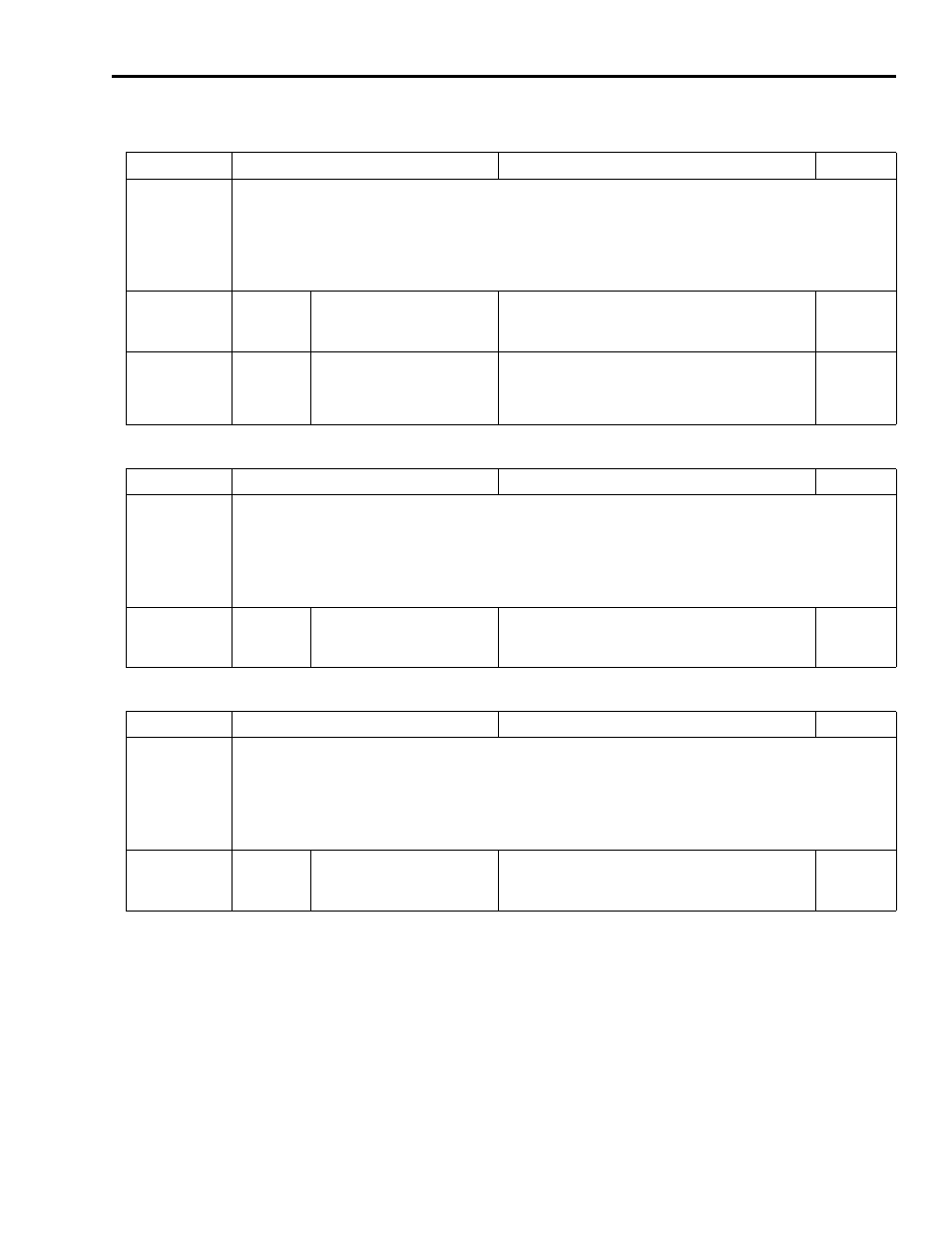
Name: Velocity_Error
Data Display: Decimal
R, Link
Parameter No.
347
File:
Control
Group:
Velocity
Description: Velocity error. The current difference between the commanded velocity and actual velocity is placed
in this parameter
Default:
0
Length
2 bytes
SCANport Min/Max
Min.
≥ -30,000
Max.
≤ +30,000
SCANport Scaling Resolution
1 = 1 RPM
Units
RPM
Default:
Length
4 bytes
SERCOS/DPI Min/Max
Minimum Input:
≥ -2
31
Maximum Input:
≤ +2
31
-1
SERCOS/DPI Scaling Resolution
Scaling type parameter 44
Scaling factor parameter 45
Scaling exponent parameter 46
Units
parameter
44
Name: Acc_Fdfwd_Gain_0
Data Display: Decimal R/W
Parameter No.
348
File:
Servo Loop
Group:
Group 0
Description: Acceleration feed forward gain. This parameter is one of the 8 sets of servo loop parameters.
Acceleration feed forward is when minimum following error is desired and serves to reduce acceleration /
deceleration-dependent following error.
Default:
0.00
Length
2 bytes
Minimum/Maximum
Minimum Input:
≥ 0
Maximum Input:
≤ +100.00
Scaling Resolution
1 = .01%
Units
%
Name: DC_Bus_Voltage
Data Display: Decimal
R, Link
Parameter No.
380
File:
Status/Faults
Group:
Drive Status
Description: DC bus voltage. The drive’s DC (intermediate) bus voltage value is placed in this parameter.
Default:
From RPS
Length
2 bytes
Minimum/Maximum
Minimum Input:
≥ 0
Maximum Input:
≤ +1000
Scaling Resolution
1 = 1 volt
Units
Volt