Rockwell Automation 8720MC Drives Integration Manual User Manual
Page 136
Publication 8720MC-IN002A-EN-P — December 2002
C-24
Programming Parameters
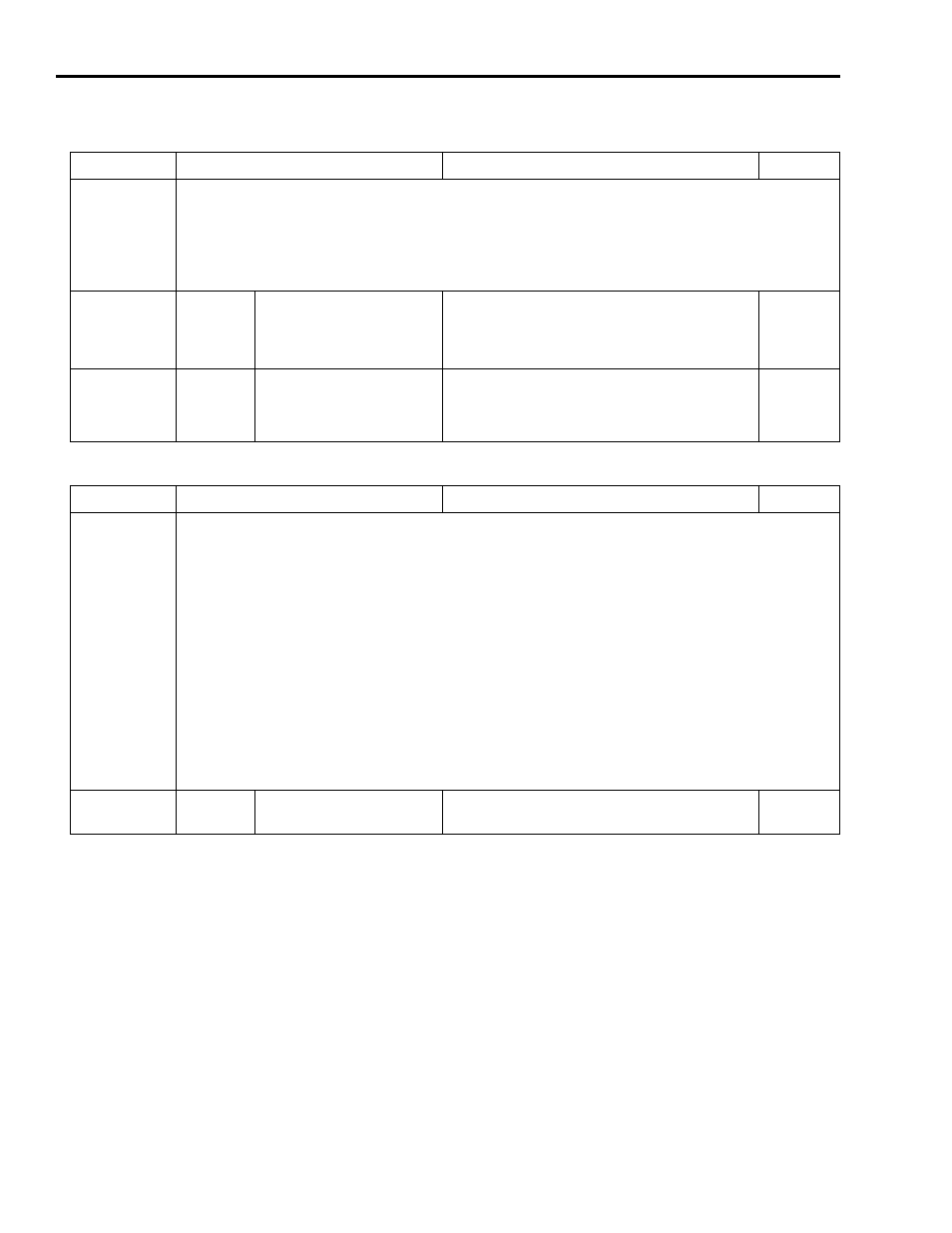
Name: Torque_Fback
Data Display: Decimal
R, Link
Parameter No.
84
File:
Control
Group:
Torque
Description: The torque feedback value can be is transferred from the drive to the control unit via SERCOS.
Default:
0.0
Length
2 bytes
SCANport Minimum/
Maximum
Min.
≥ -1000.0
Max.
≤ +1000.0
SCANport Scaling Resolution
1=.1%
Units
%
Default:
0
Length
2 bytes
SERCOS/DPI Min/Max
Min.
≥ -2
15
Max.
≤ +2
15
- 1
SERCOS/DPI Scaling Resolution
Scaling type: parameter 86
Scaling factor: parameter 93
Scaling exponent: parameter 94
Units
parameter
86
Name: Torque_Polarity
Data Display: Bit Pattern
R/W
Parameter No.
85
File:
Control
Group:
Torque
Description: Torque polarity parameter. This parameter is used to switch polarities of reported torque data for
specific applications. Polarities are not switched internally but externally (on the input and output) of a closed loop
system. The motor shaft turns clockwise when there is a positive torque command difference and no inversion.
Enumerated Bit Pattern:
Structure of torque polarity parameter:
Bit 0 – Torque command value
0 = non-inverted
1 = inverted
Bit 1 – Additive torque command value
0 = non-inverted
1 = inverted
Bit 2 – Torque feedback value
0 = non-inverted
1 = inverted
Bits 15-3 (reserved)
This parameter is available with the 8720MC SERCOS interface.
Default:
x000
Length
2 bytes
Minimum/Maximum
N/A
Scaling Resolution
N/A
Units
N/A