Rockwell Automation 8720MC Drives Integration Manual User Manual
Page 141
Publication 8720MC-IN002A-EN-P — December 2002
Programming Parameters
C-29
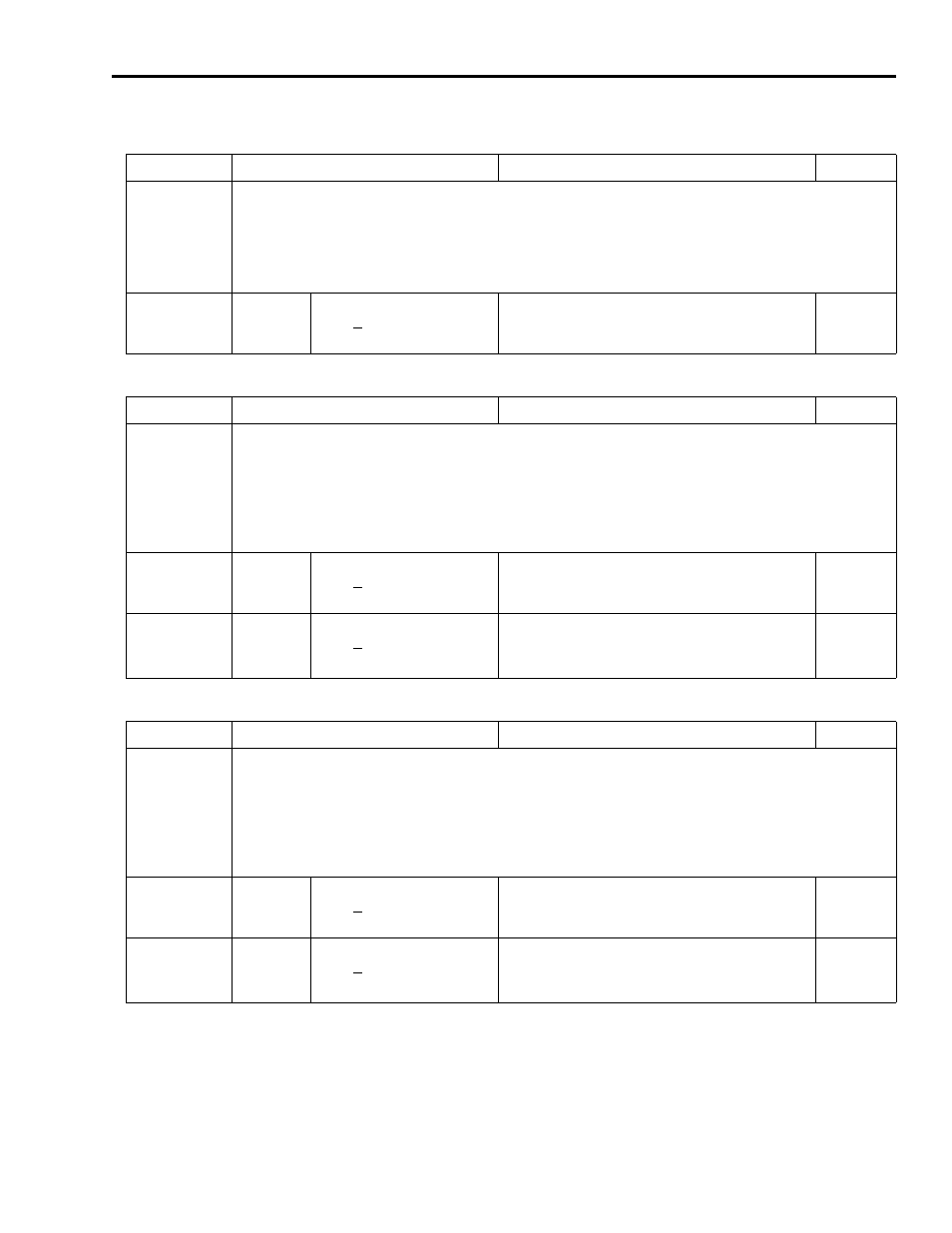
Name: Cur_Bandwidth
Data Display: unsigned Integer
R
Parameter No.
106
File:
Control:
Group:
Torque
Description: This attribute defines the tuned bandwidth setting so that the current regulator’s K
P
and K
I
can be
derived.
Default:
2000
Length
2 bytes
Minimum/Maximum
Min. > .1
Max.
≤ 6553.5
Scaling Resolution
1 = 1 rad/s
Units
rad/s
Name: Mtr_Peak_Current
Data Display: Decimal
R/W
Parameter No.
109
File:
Motor/Drive/
Fdbk
Group:
Motor Data
Description: If the motor peak current is less than the capacity of the drive amplifier, the amplifier is
automatically limited to the level of the motor peak current. Parameter 109 motor peak RMS current at rated
(base) speed. For a standard 8720SM motor with Stegmann feedback this value is read from the motor encoder
memory.
Default:
From motor
encoder
Length
2 bytes
Analog Minimum/Maximum
Min. > 0
Max.
≤1000.0
Analog Scaling Resolution
1 = .1 amps
Units
amps
Default:
From motor
encoder
Length
4 bytes
SERCOS Min/Max
Min. > 0
Max.
≤ 2
32
- 1
SERCOS Scaling Resolution
1 = .001 amps
Units
amps
Name: Drive_Peak_Amps
Data Display: Decimal
R
Parameter No.
110
File:
Motor/Drive/
Fdbk
Group:
Drive Data
Description: The amplifier peak current is limited by the drive hardware, which means that the current for the
maximum attainable torque limit value is fixed as well. This parameter is determined by the drive and can’t be
changed.
Default:
From drive
amplifier
Length
2 bytes
SCANport Min/Max
Min. > 0
Max.
≤ 3000.0
SCANport Scaling Resolution
1 = .1 amps
Units
amps
Default:
From drive
amplifier
Length
4 bytes
SERCOS/DPI Min/Max
Min. > 0
Max.
≤ 2
32
- 1
SERCOS/DPI Scaling Resolution
1 = .001 amps
Units
amps