IAI America RCM-GW-CC User Manual
Page 76
72
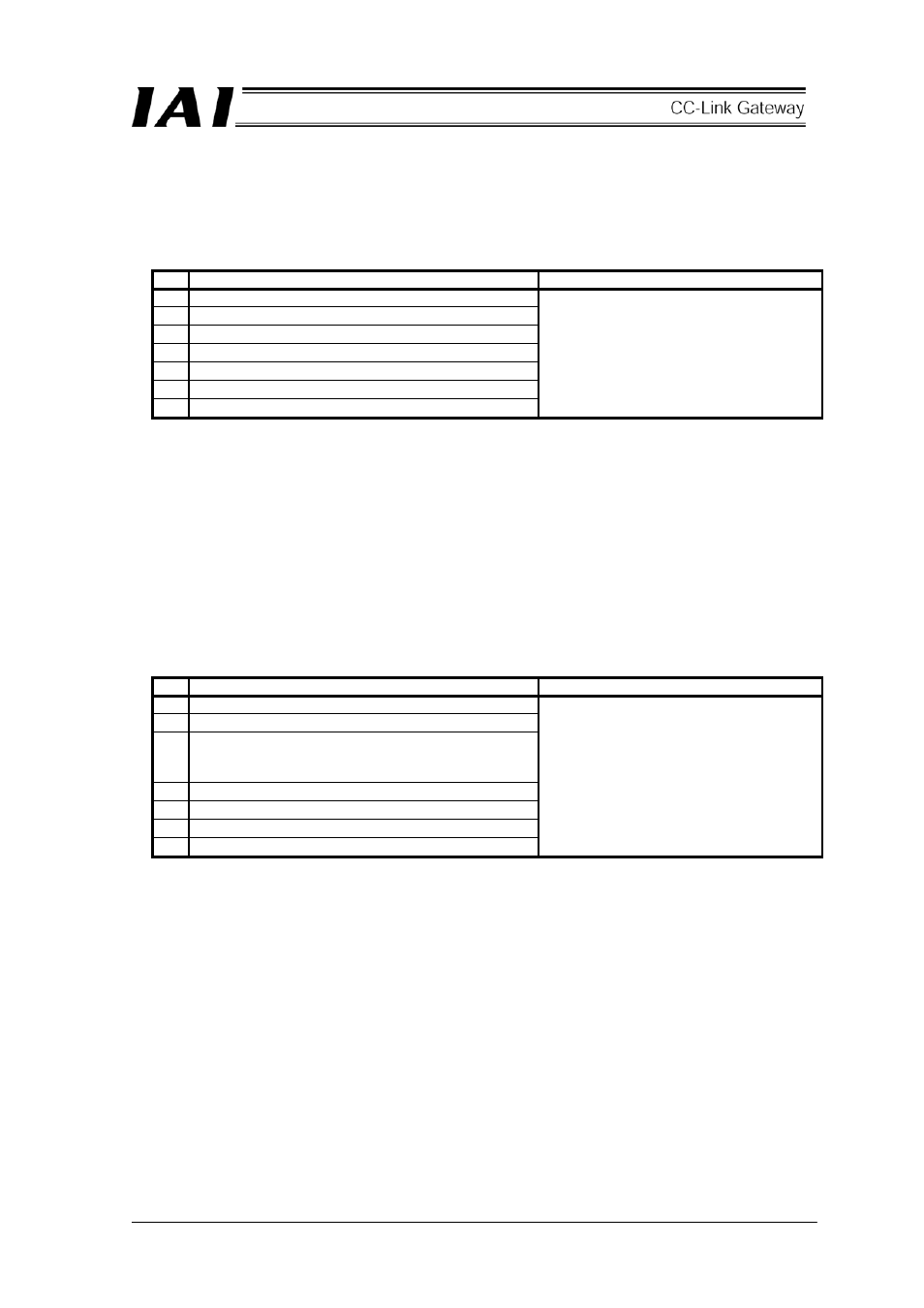
[5] Group designated broadcast POS movement start
This command simultaneously starts an axis designated by group No. to a position designated by POS
No. This command performs communication between gateway and controller by broadcast, therefore,
response from the controller does not return.
The response result displayed on the PCL input means that communication to the controller normally
ended, and does not indicate status of the controller. Determine the status from the status signal to each
axis.
*1
PLC output (request)
PLC input (response)
+2 0D03
H
3
POS No. *2
4
Group ID No. *3
5 0
6 0
7 0
8 0
Same value as request at normal
*1) Relative RY and relative RX from the head
*2) Possible values depend on type of robo-cylinder and its setting.
*3) If this is 0, all of the linked axes move regardless of group designation.
Setting of group No. is performed by system parameter setting of personal computer supporting
software.
*4) When movement command is issued by control word for every axis in process of movement by this
command, movement by this command is cancelled and operation is performed by the latest
movement command. Note that each axis has two movement command interfaces.
Use these two interfaces exclusively.
*5) Even if a link to CFG of gateway control signal is eliminated by bit OFF operation, the controller
always receives this command and executes after the link is once established.
[6] PIO/Modbus switching command
*1
PLC output (request)
PLC input (response)
+2 0DA1
H
3 0
4 Coil
ON/OFF
00FF
H
=ON: Modbus (PIO command ineffective)
0000
H
=OFF: PIO (PIO command effective) *2
5 0
6
Axis No. 0 to F
H
7 0
8 0
Same value as request at normal
*1) Relative RY and relative RX from the head
*2) PIO/Modbus switching status is reflected on the status signal PMSS. And, this is not allowed to be
set for the position No. designated movement axis (Invalid request command error (0103H) occurs).
*3) When coil OFF (PIO command effective) is designated, it is also possible to change position data of
axis from the PLC by Modbus communication (The link should be held).
*4) When control right for the controller is on the PIO, do not issue movement command from the
Modbus.