5 push operation enable mode – IAI America RCM-GW-CC User Manual
Page 56
52
6.5 Push operation enable mode
This is an operation mode to perform operation by directly writing current limit value (%) and positioning width
for push in addition to direct designation of position data, acceleration and deceleration and speed into the
register of the PLC, and allows for control of a maximum 3 axes.
Further, it is always possible to read present position data.
Setting of position table for each axis is unnecessary.
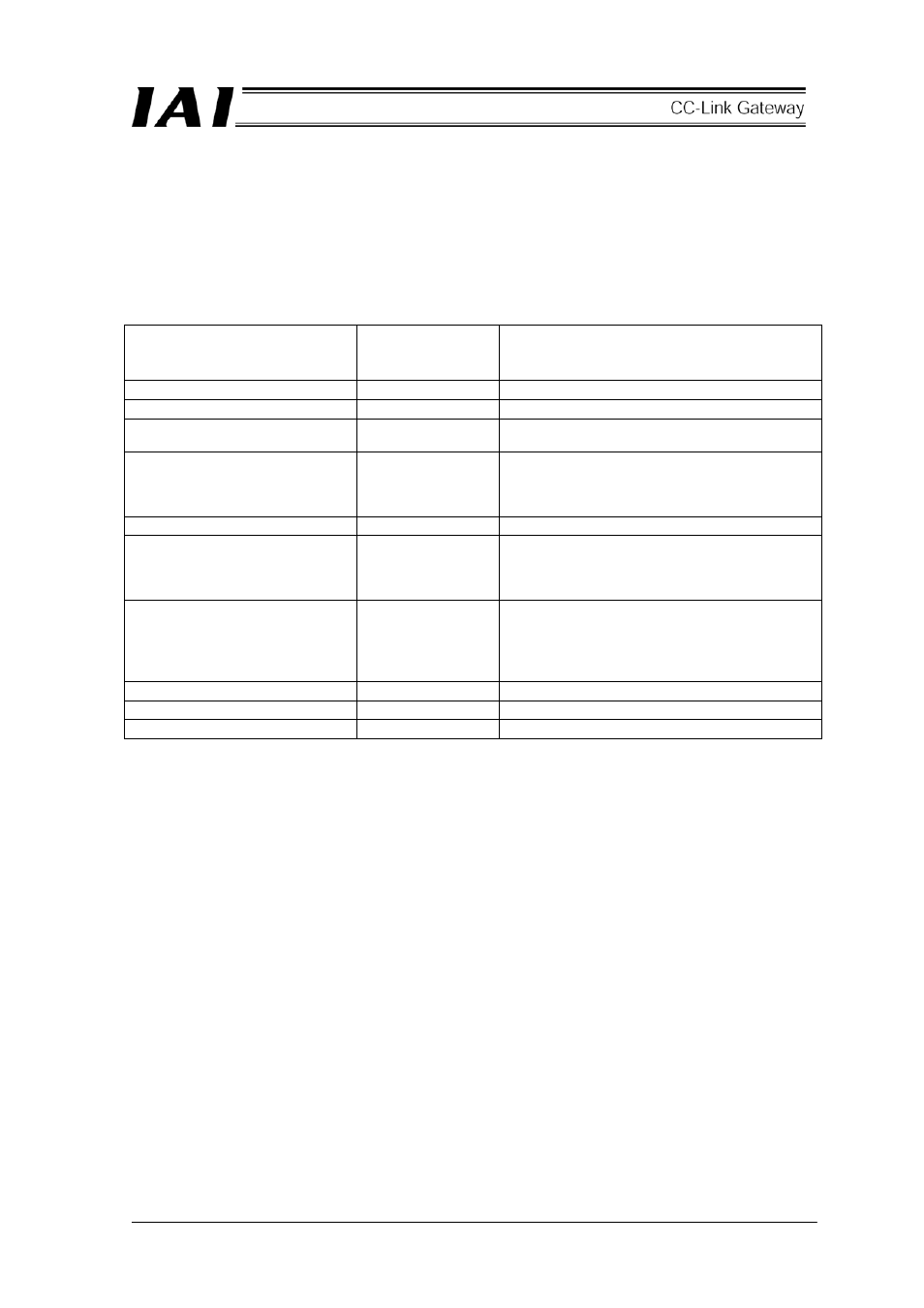
Primary functions controllable in this mode are as shown in the following table.
Primary functions
○
: Direct control
△
: Indirect control
×
: Ineffective
Remarks
Home return operation
○
Positioning operation
○
Speed, acceleration and
deceleration setting
○
Pitch (incremental) feed
△
Pitch feed data cannot be directly processed.
Give command by adding or subtracting data of
same moving amount to/from the present position
by host PLC.
Push operation
○
Speed change during movement
○
Speed data is accepted at start of positioning.
Therefore, if you attempt to change the speed in
process of movement, change the speed data
and restart during moving.
Operation in different acceleration
and deceleration
○
Acceleration and deceleration data is accepted at
start of positioning. Therefore, if you attempt to
designate deceleration different from
acceleration, change the acceleration and
deceleration data during movement and restart.
Pause
○
Zone signal output
△
Monitor the present position data by the PLC. (*)
PIO pattern selection
×
* There is no strobe signal in the present position data. Therefore, when checking the present position by
the PLC during movement, provide a range to check that there is data of 2 scans or more in the range.