Fairbanks X SERIES PR 5220 ETHERNET TRANSMITTER User Manual
Page 42
Section 5: Commissioning
05/11 43
51209 Revision 2
5.4.15 Subsequent Dead Load Correction
If the hopper/platform weight changes by an amount that is higher than the zero-setting range; e.g.,
due to dead load reduction, dead load increase or mechanical changes, the functions for automatic
zero tracking and manual zero setting no longer work. To view the range which is already utilized by
zero tracking or zero setting, select [Calibration] and press
; this also activates 10-fold increased
resolution of the weight value. Press
again to return to the previous state:
Current zero setting: 0.123 kg
If the entire zero-setting range is already utilized, you can still correct the dead load (CAL switch
must be open) without affecting other calibration data/parameters.
To do this, select
-[Calibration]-[Modify] and determine the dead load with [Dead load at]-[by load]
(see Chapter 5.4.9).
5.4.16 Linearization
After selecting
-[Calibration]-[New]/[Modify] and after completing calibration, select the
linearization menu with softkey [Linear.]:
by load
by mV/V
by data
Linear.
Test
When you press [Linear], the menu shown below appears:
WP A/Calibration/Linearisation
Max at
3000.00 kg
1.000000
Add
by mV/V
by load
To add a new linearization point, press [Add], fill in the weight value, apply the weight and press [by
load]. Then fill in the corresponding value in mV/V for the weight. After pressing [mV/V], the value
can be entered directly.
Up to 3 linearization points can be determined.
A linearization point can be added with [Add], removed with [Delete] and changed with [Change].
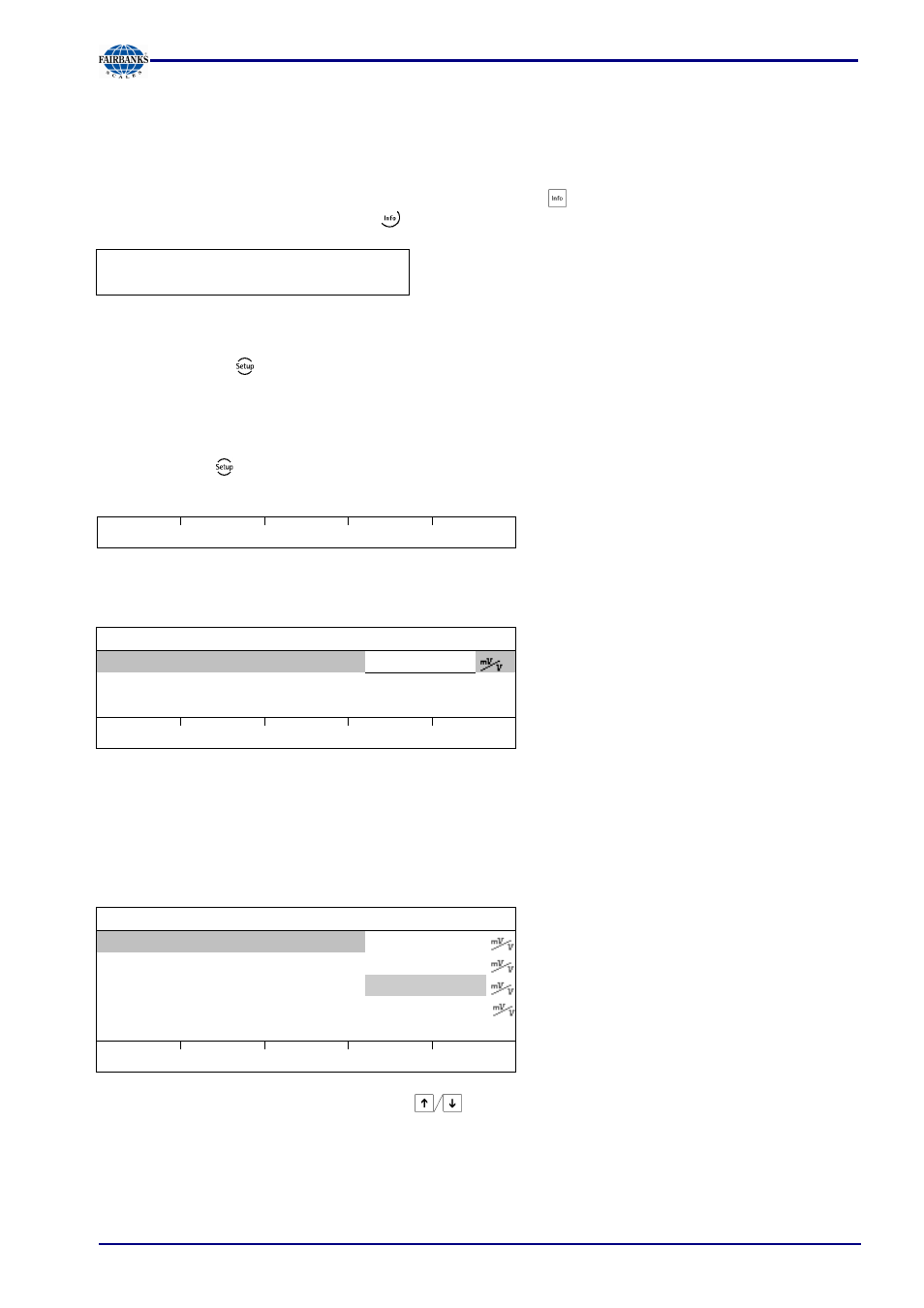
WP A/Calibration/Linearisation
1. Lin. point
750 kg
0.250010
2. Lin. point
1500 kg
0.500020
3. Lin. point
2250 kg
0.750040
Max at
3000.00 kg
1.000000
Add
Change
Delete
by mV/V
by load
A linearization point can be selected with
,
changed with [Change] and deleted with [Delete].