Positioner 1067, Appendix – Burkert Type 1067 User Manual
Page 97
POSITIONER 1067
E-45-
APPENDIX
As shown in the figure of the previous page, the proportional action coefficient Ks of the control system
can be calculated by way of the increase in the inflectional tangent, i. e. by way of ΔX/ΔY: manipulated
variable change)
Ks
=
ΔX
ΔY
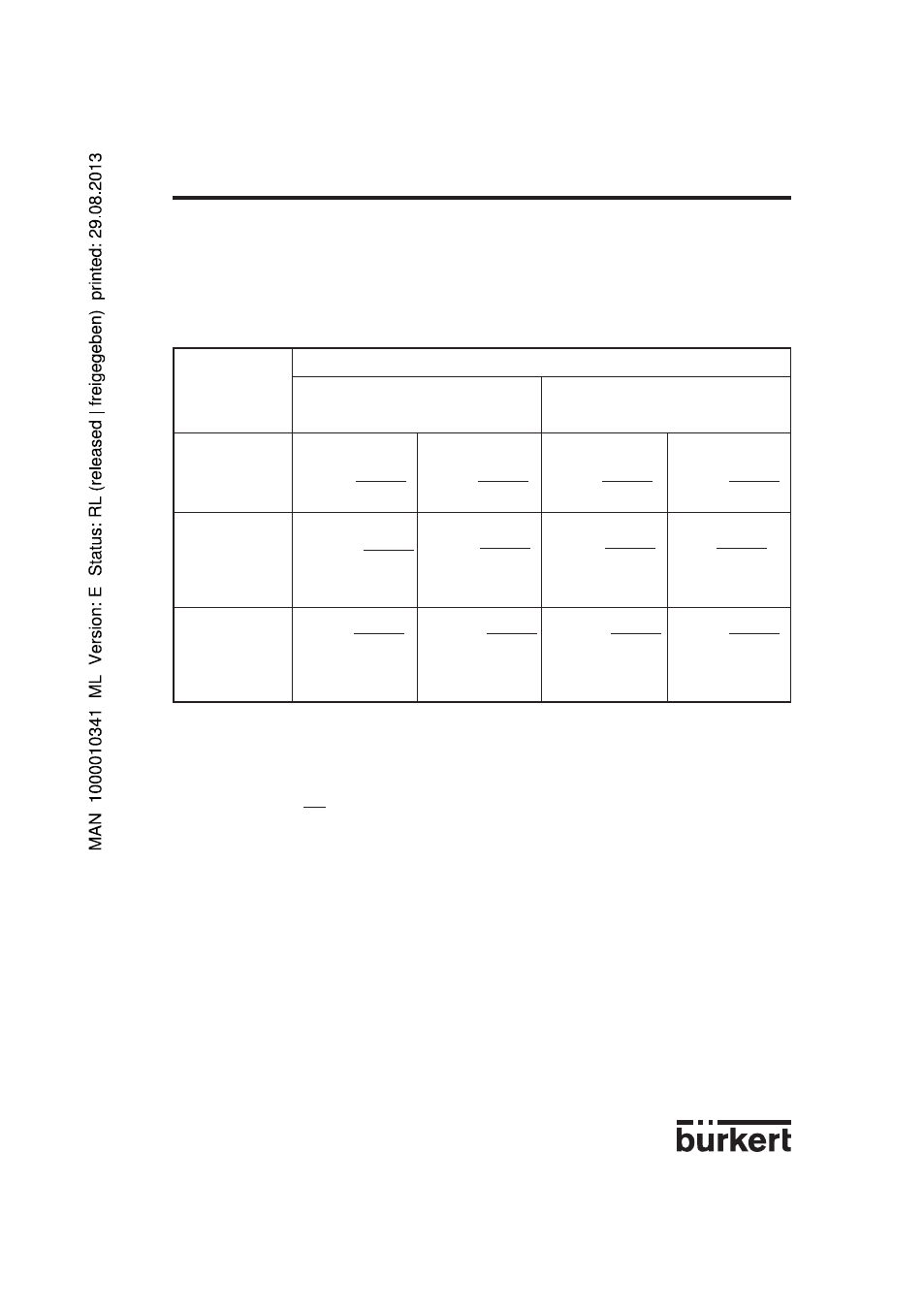
The following table lists the settings for the controller parameters depending on Tu, Tg and Ks for com-
mand and disturbance response and for an aperiodic control operation as well as a control operation
with 20% overshoot. They apply to systems with a P response, with a dead time and with a delay of the
1st order.
Parameter settings according to Chien, Hrones and Reswick :
Parameter
settings
Controller
type
Aperiodic control operation
Control operation with
(0% overshoot)
20% overshoot
Command
Disturbance
Command
Disturbance
P controller
KP = 0,3
Kp = 0,3
Kp = 0,7
Kp = 0,7
PI controller
Kp = 0,35
Kp = 0,6
Kp = 0,6
Kp 0,7
Tn = 1,2 Tg
Tn = 4 • Tu
Tn = Tg
Tn = 2,3 • Tu
PID controller
Kp = 0,6
Kp = 0,95
Kp = 0,95
Kp = 1,2
Tn = Tg
Tn = 2,4 • Tu
Tn = 1,35 • Tg
Tn = 2 • Tu
Tv = 0,5 • Tu
Tv = 0,42 • Tu
Tv = 0,47 • Tu
Tv = 0,42 • Tu
Tg
Tu • Ks
Tg
Tu • Ks
Tg
Tu • Ks
Tg
Tu • Ks
Tg
Tu • Ks
Tg
Tu • Ks
Tg
Tu • Ks
Tg
Tu • Ks
Tg
Tu • Ks
Tg
Tu • Ks
Tg
Tu • Ks
Tg
Tu • Ks