Positionneur 1067, Annexes – Burkert Type 1067 User Manual
Page 146
F-44-
POSITIONNEUR 1067
A partir de Kcrit et de Tcrit, les paramètres du régulateur peuvent alors être calculés à l’aide du tableau
ci-après.
Réglage des paramètres selon Ziegler et Nichols :
Type de régulateur
Réglage des paramètres
Régulateur P
Kp = 0,5 Kcrit
Régulateur PI
Kp = 0,45 Kcrit
Tn = 0,85 Tcrit
Régulateur PID
Kp = 0,6 Kcrit
Tn = 0,5 Tcrit
Tv = 0,12 Tcrit
Les règles d'ajustement de Ziegler et Nichols ont été déterminées pour des circuits P avec un retard du
premier ordre et un temps mort. Elles ne s’appliquent cependant qu’aux régulateurs réagissant à une
perturbation et non pas aux régulateurs réagissant à une commande.
Règles de réglage selon Chien, Hrones et Reswick (méthode du saut de la variable réglante)
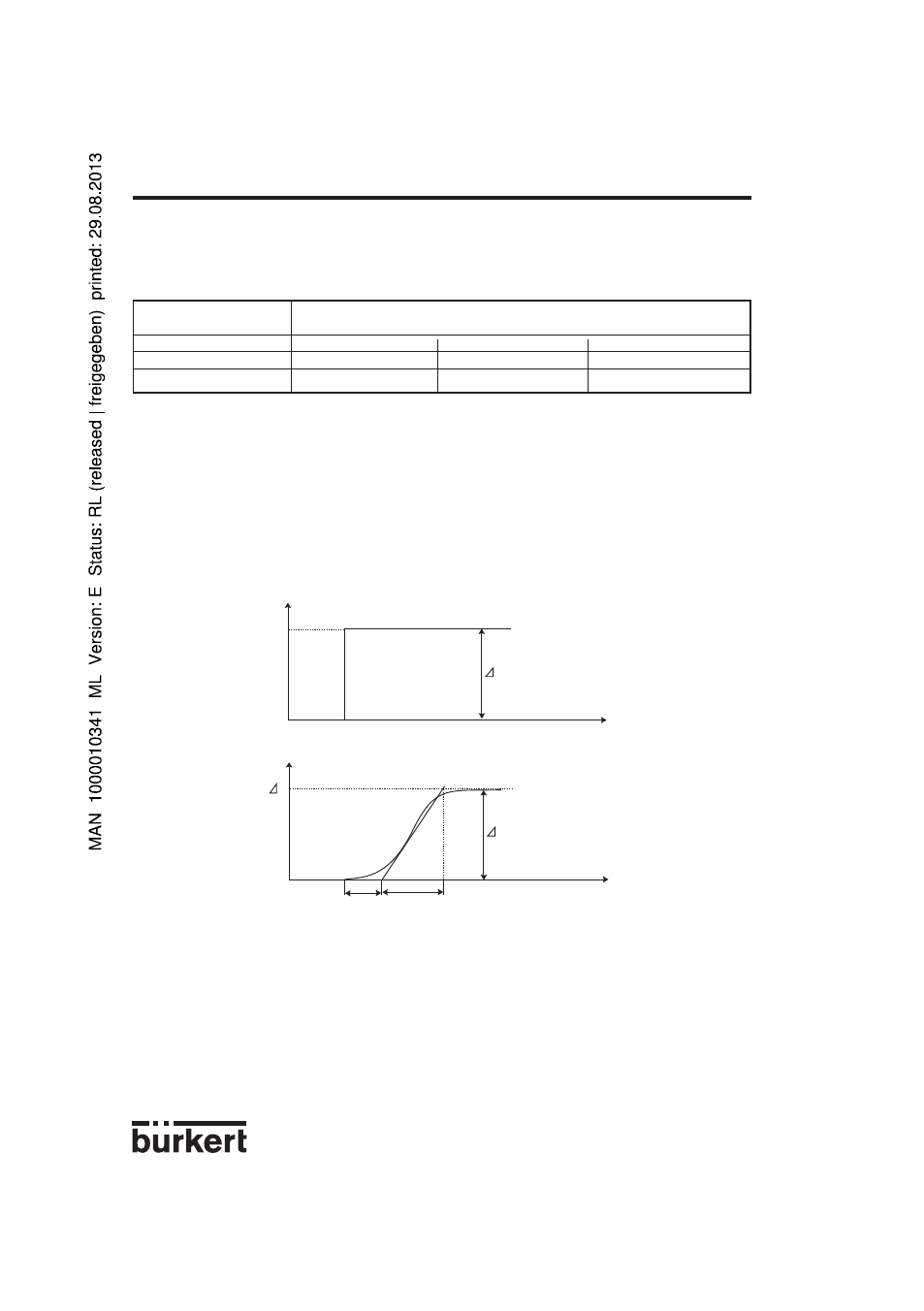
Avec cette méthode, le réglage des paramètres du régulateur est effectué sur la base du comportement
transitoire du système réglé. Considérons un saut de la variable réglante de 100% ; les temps Tu et Tg
sont obtenus à partir de la caractéristique de la variable (figure ci-dessous). Ks est le gain statique du
système.
ANNEXES
Figure : Caractéristique de la variable réglée après un saut de la variable réglante ΔY
Manière de procéder :
• Mettre le régulateur sur MANUEL.
• Effectuer un saut de la variable réglante et enregistrer la variable réglée avec un enregistreur.
• Pour les processus critiques (p. ex. risque de surchauffe), mettre à l’arrêt à temps (attention, dans
le cas des systèmes thermiquement inertes, la valeur rélle de la variable réglée peut continuer
d’augmenter après la mise à l’arrêt).
Valeur instantanée
t
X
X
Tu
Tg
KS.
X
t
Y
Y
100%