Positionneur 1067 annexes – Burkert Type 1067 User Manual
Page 147
F-45-
POSITIONNEUR 1067
ANNEXES
Le coefficient de gain statique Ks du système peut être calculé conformément à la figure de la page
précédente par l’augmentation de la tangente d’inflexion, c’est-à-dire par ΔX/ΔY
(ΔY : saut de la variable réglante) :
Ks
=
ΔX
ΔY
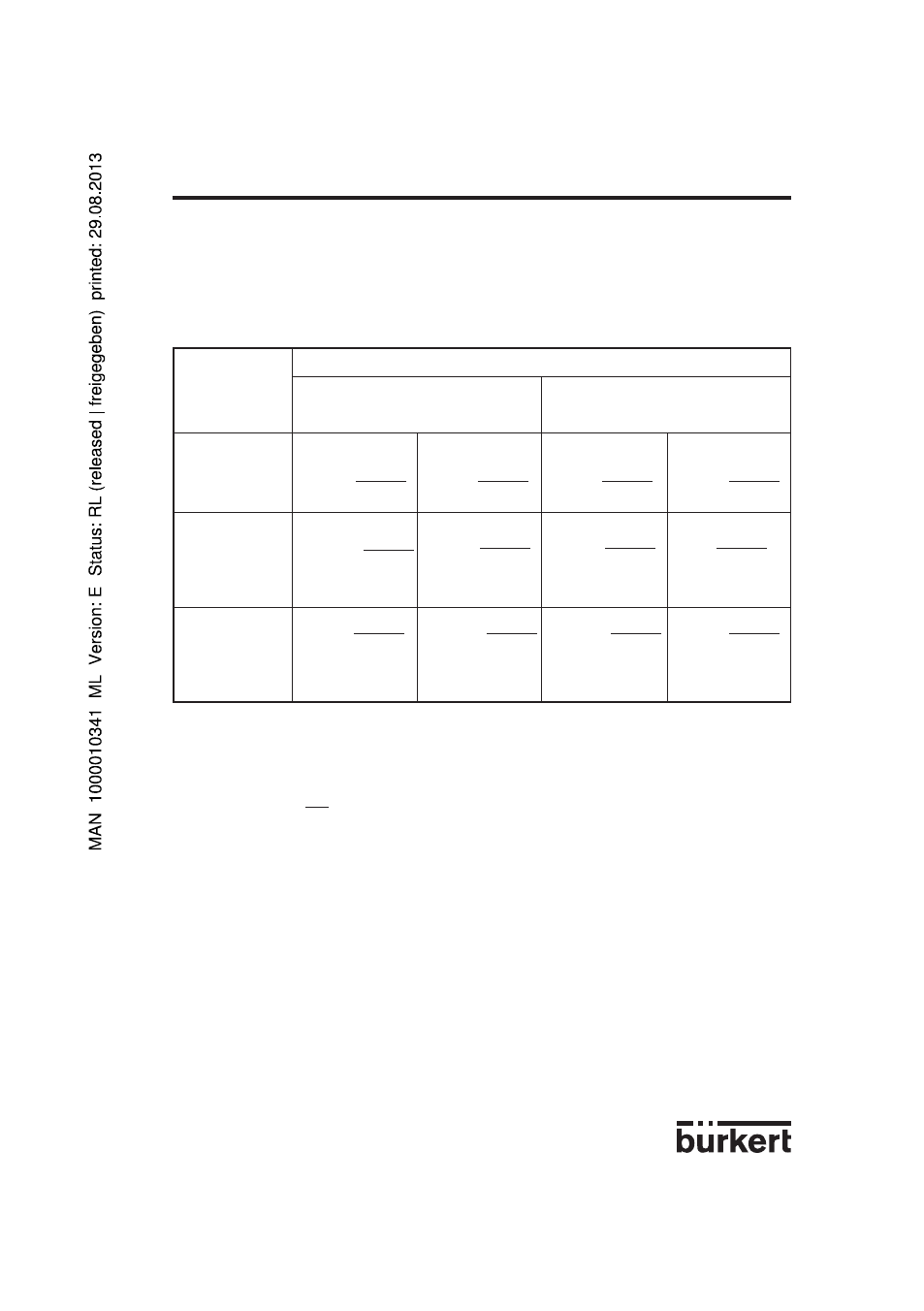
Le tableau ci-après indique les valeurs de réglage pour les paramètres du régulateur en fonction de Tu,
Tg et Ks pour les régulateurs réagissant à une commande et à une perturbation de même que pour un
processus de régulation apériodique et un processus de régulation avec dépassement de 20 %. Ces
règles concernent les circuits à comportement P, avec temps mort et retard du 1er ordre.
Réglage des paramètres selon Chien, Hrones et Reswick :
Réglage des paramètres
Type de
régulation
Régulation apériodique
Régulation avec
(dépassement 0 %)
dépassement 20 %
Commande
Perturbation
Commande
Perturbation
Régulateur P
KP = 0,3
Kp = 0,3
Kp = 0,7
Kp = 0,7
Régulateur PI
Kp = 0,35
Kp = 0,6
Kp = 0,6
Kp 0,7
Tn = 1,2 Tg
Tn = 4 • Tu
Tn = Tg
Tn = 2,3 • Tu
Régulateur PID
Kp = 0,6
Kp = 0,95
Kp = 0,95
Kp = 1,2
Tn = Tg
Tn = 2,4 • Tu
Tn = 1,35 • Tg
Tn = 2 • Tu
Tv = 0,5 • Tu
Tv = 0,42 • Tu
Tv = 0,47 • Tu
Tv = 0,42 • Tu
Tg
Tu • Ks
Tg
Tu • Ks
Tg
Tu • Ks
Tg
Tu • Ks
Tg
Tu • Ks
Tg
Tu • Ks
Tg
Tu • Ks
Tg
Tu • Ks
Tg
Tu • Ks
Tg
Tu • Ks
Tg
Tu • Ks
Tg
Tu • Ks