Positioner 1067 anhang – Burkert Type 1067 User Manual
Page 40
D-40-
POSITIONER 1067
ANHANG
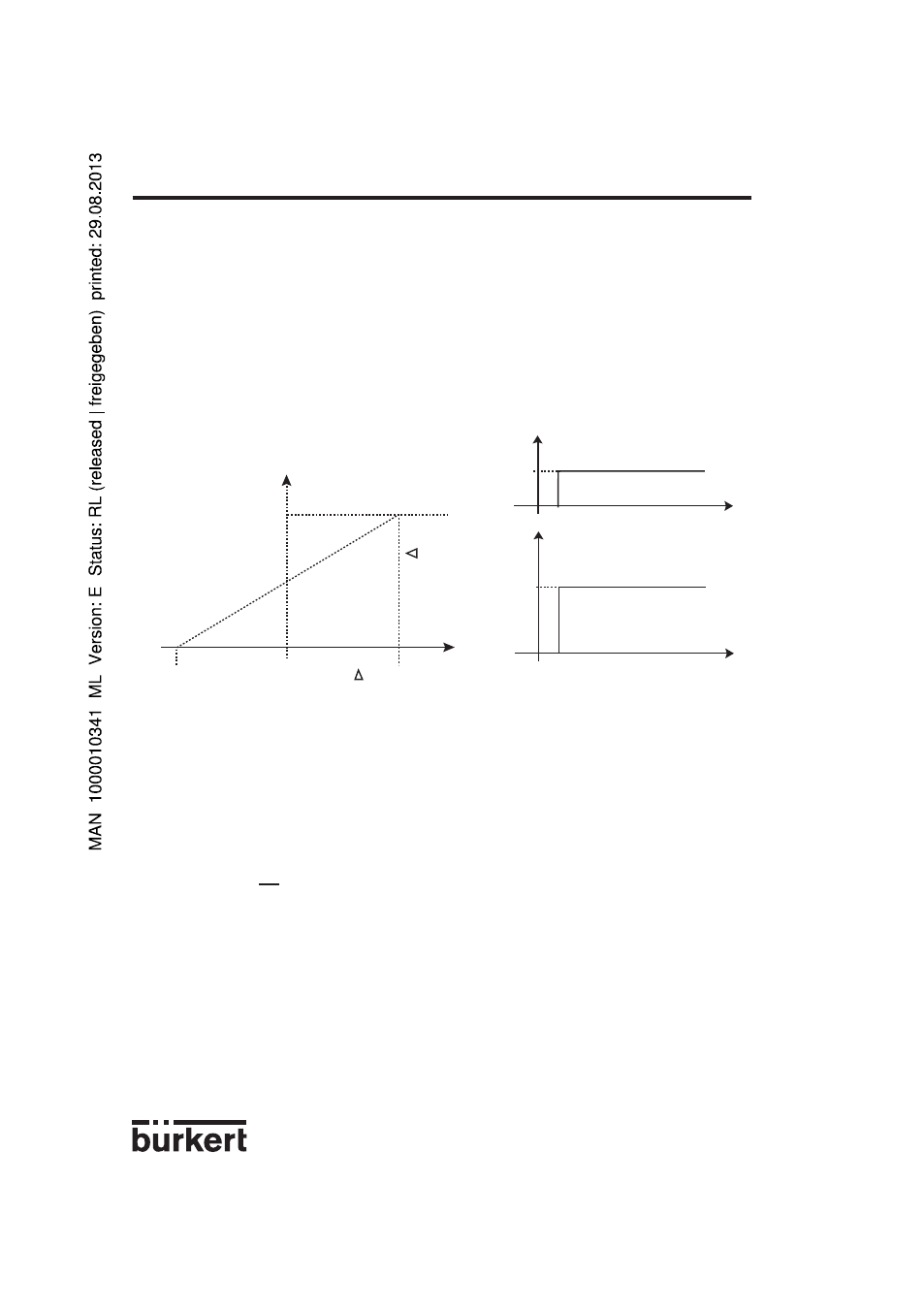
A1: Eigenschaften von PID-Reglern
Ein PID-Regler besitzt einen Proportional-, einen Integral- und einen Differentialanteil (P-, I- und D-
Anteil).
P-Anteil :
Funktion :
Y = Kp • Xd
Kp ist der Proportionalbeiwert. Er gibt sich als Verhältnis von Stellbereich ΔY zu Proportional-bereich
ΔXd.
t
t
X
Y
Xd
Kp.Xd
Kp. Xd
1
Ti
Ein reiner P-Regler arbeitet theoretisch unverzögert, d.h. er ist schnell und damit dynamisch günstig. Er
hat eine bleibende Regeldifferenz, d.h. er regelt die Auswirkungen von Störungen nicht vollständig aus
und ist damit statisch relativ ungünstig.
I-Anteil :
Y =
ƒ
Xd dt
Ti ist die Integrier- oder Stellzeit. Sie ist die Zeit, die vergeht, bis die Stellgröße den gesamten Stellbe-
reich durchlaufen hat.
Y
Xd
Y0
Ymax
Ymin
Xd
Y
Stellbereich
Proportionalbereich
- Type 1062 (112 pages)
- Type 8750 (64 pages)
- Type 8750 (82 pages)
- Type 1050 (4 pages)
- Type 8681 (40 pages)
- Type 8681 (90 pages)
- Type 8798 (2 pages)
- Type 8791 (4 pages)
- Type 8798 (106 pages)
- Type 8792 (136 pages)
- Type 8792 (252 pages)
- Type 8718 (34 pages)
- Type 8792 (118 pages)
- Type 8791 (15 pages)
- Type 8791 (106 pages)
- Type 8791 (184 pages)
- Type 8791 (28 pages)
- Type 8791 (21 pages)
- Type 8791 (154 pages)
- Type 0911 (76 pages)
- Type 0911 (46 pages)
- Type 0911 (64 pages)
- Type 0911 (84 pages)
- Type 1058 (31 pages)
- Type 1060 (4 pages)
- Type 1066 (112 pages)
- Type 1077-2 (33 pages)
- Type 1094 (12 pages)
- Type 1094 (41 pages)
- Type 1094 (82 pages)
- Type 1094 (126 pages)
- Type 1115 (25 pages)
- Type 1150 (99 pages)
- Type 1541 (2 pages)
- Type 5142 (6 pages)
- Type 8619 (134 pages)
- Type 8619 (40 pages)
- Type 8620 (177 pages)
- Type 8622 (4 pages)
- Type 8623 (130 pages)
- Type 8623 (90 pages)
- Type 8625 (118 pages)
- Type 8624 (124 pages)
- Type 8718 (254 pages)