3 principe de fonctionnement – Burkert Type 1067 User Manual
Page 108
F-6-
POSITIONNEUR 1067
2 DESCRIPTION
2.3 Principe de fonctionnement
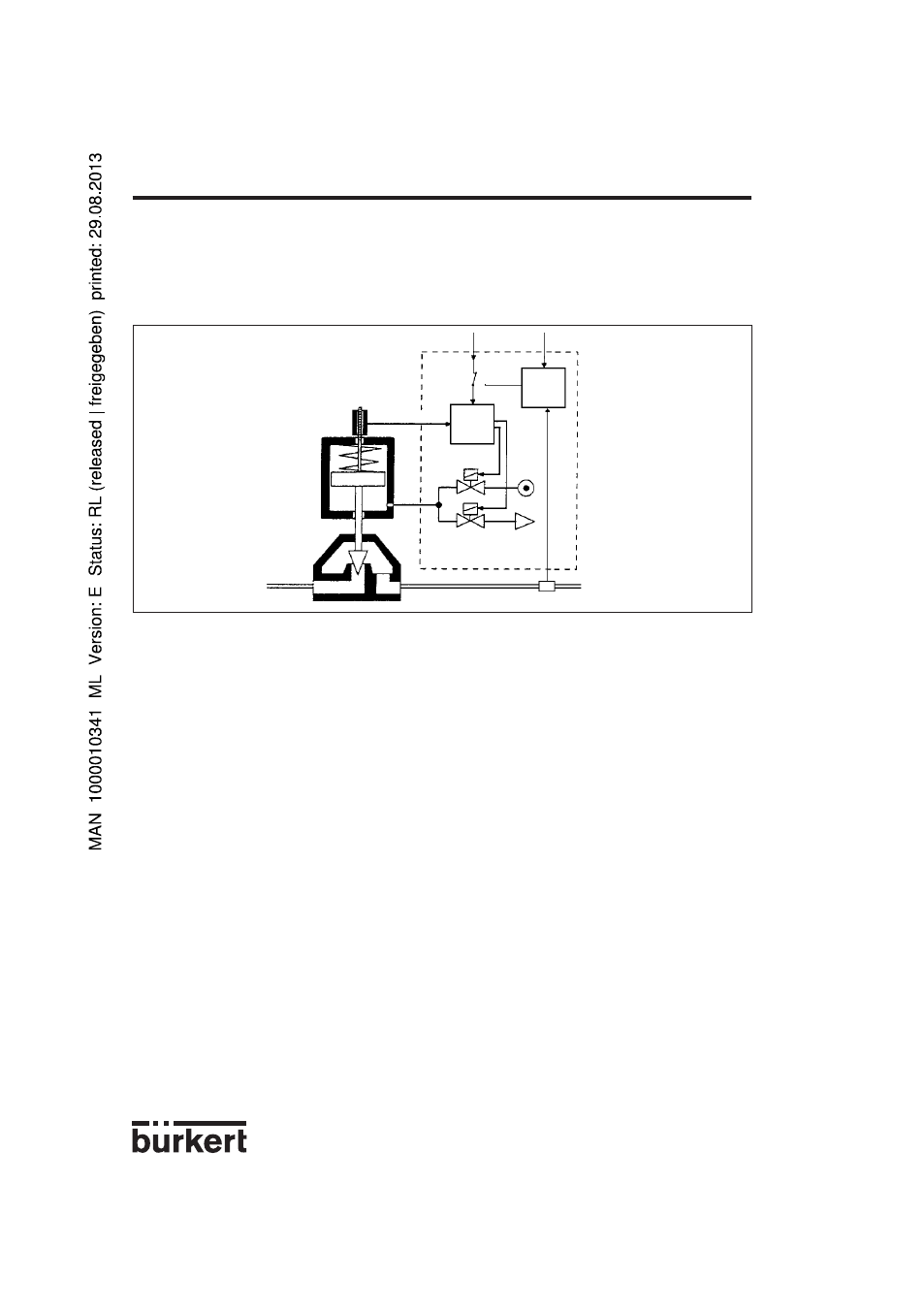
La figure 4 représente le schéma de fonctionnement du positionneur en liaison avec une vanne à com-
mande par piston. Un indicateur de position externe (variantes 2 et 3) permet de déterminer la position
effective.
Fig. 4 Schéma de fonctionnement
Capteur de position
Entrée air
Electrovannes
Echappement
Consigne externe
de position
Consigne
externe de
procédé
Régulateur
de
procédé
Consigne
de
position
Régulateur
de position
Position
effective
Vanne de
régulation
Capteur
Grandeur du procédé (Pression, débit, niveau...)
La position (position effective) de la commande de la vanne est déterminée par l'indicateur de position.
Le positionneur compare en permanence le signal correspondant à la position effective avec le signal
affecté à la consigne de position et calcule la différence de réglage (écart de réglage). En fonction
de la différence de réglage, il transmet des impulsions de longueurs différentes aux électrovannes qui
commandent l’alimentation ou l’évacuation du servomoteur de la vanne. La position de consigne peut
être spécifiée soit de l’extérieur par une saisie d'un signal unitaire (par exemple manuellement via un
régulateur externe), soit par le régulateur du procédé interne à l’appareil. Dans ce dernier cas, la valeur
de consigne du procédé est appliquée à l’entrée du signal unitaire ou par le clavier et elle est comparée
à la variable du procédé (par exemple débit, pression, niveau, température) (fig. 4).
Si la position de consigne est spécifiée de l’extérieur par l’entrée d'un signal unitaire prévue à cet
effet (et que le régulateur du procédé interne n’est donc pas utilisé), l’appareil fonctionne uniquement
comme un régulateur de position (fig. 5). Le régulateur de position est intégré dans le microprocesseur
sous forme de régulateur proportionnel. Un élément PWM (modulation de largeur d’impulsion) est
monté en aval de la sortie du régulateur; ses sorties B
1
et E
1
permettent de commander les électrovan-
nes d'alimentation ou d'échappement du servomoteur. En cas de différence positive, des impulsions
(signaux PWM) sont émises à la sortie B
1
pour commander l’air d’alimentation et en cas de différence
négative, des impulsions sont émises à la sortie E
1
pour commander l’échappement.
Le positionneur est disponible pour des servomoteurs à simple ou à double action. Pour l’utilisation sur
des servomoteurs à double action, l’élément PWM possède deux autres sorties B
2
et E
2
par lesquelles
sont commandées les deux électrovannes supplémentaires, d'alimentation et d'échappement.
Si le régulateur du procédé interne à l’appareil est utilisé, il fera partie intégrante d’un circuit de réglage
central (circuit de réglage principal). Le réglage de la position précédemment évoqué se déroule alors
dans un circuit de réglage auxiliaire. On obtient ainsi un réglage en cascade (fig. 6). Le régulateur de
procédé interne à l’appareil (régulateur principal) est intégré sous forme de régulateur PID (Z1 et Z2
représentent des valeurs de dérangement).