Positionneur 1067, Annexes – Burkert Type 1067 User Manual
Page 142
F-40-
POSITIONNEUR 1067
Fonction
caractéristique
Réponse
à
un
échelon
Caractéristiques :
L'action intégrale tend à supprimer le bruit.Elle diminue l'erreur statique mais en raison de sa vitesse
limitée, elle est plus lente que le régulateur P, et introduit de l'instabilité. Elle est donc relativement
défavorable sur le plan dynamique.
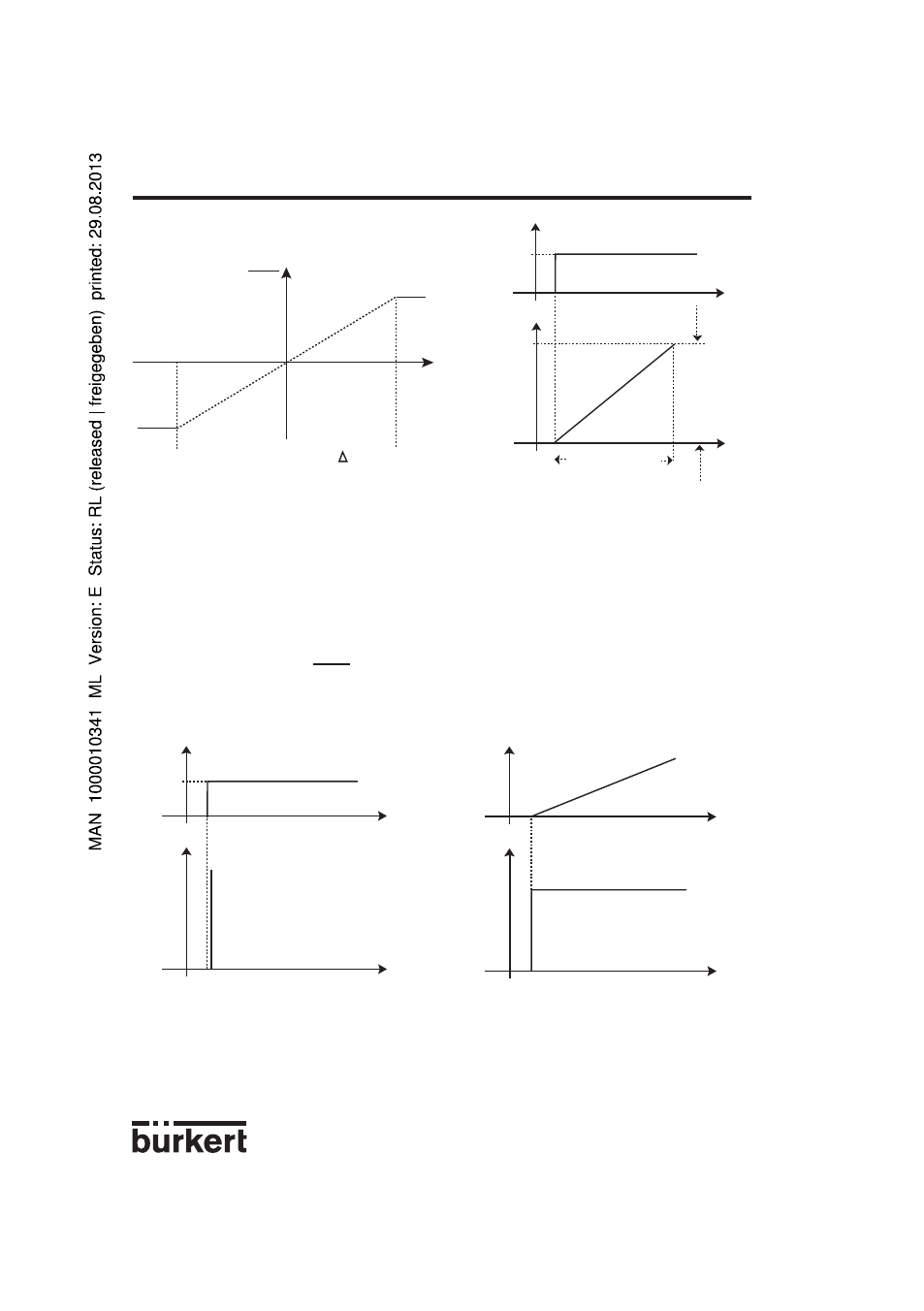
Part D :
Fonction :
Y= Kd
Kd est le coefficient d’action dérivée.
Plus Kd est élevé, plus l’influence de D est importante.
ANNEXES
Xd
Xd
dY
dt
Plage de réglage
t
t
X
Y
Xd
Ymax
Ymin
Ti
Plage de réglage
ΔY
Temps d'intégration
d Xd
dt
Réponse à un échelon
Réponse à une pente
Caractéristiques :
Un régulateur avec une partie D réagit aux modifications de la variable réglée et est capable de ce
fait de supprimer plus rapidement les écarts de régulation qui surviennent. L'action dérivée stabilise le
système mais amplifie le bruit.
t
t
X
Y
Xd
t
t
X
Y
- Type 1062 (112 pages)
- Type 1050 (4 pages)
- Type 8750 (64 pages)
- Type 8750 (82 pages)
- Type 8681 (90 pages)
- Type 8681 (40 pages)
- Type 8798 (2 pages)
- Type 8791 (4 pages)
- Type 8798 (106 pages)
- Type 8792 (118 pages)
- Type 8791 (15 pages)
- Type 8792 (136 pages)
- Type 8792 (252 pages)
- Type 8718 (34 pages)
- Type 8791 (154 pages)
- Type 8791 (106 pages)
- Type 8791 (184 pages)
- Type 8791 (28 pages)
- Type 8791 (21 pages)
- Type 0911 (64 pages)
- Type 0911 (84 pages)
- Type 0911 (76 pages)
- Type 0911 (46 pages)
- Type 1058 (31 pages)
- Type 1060 (4 pages)
- Type 1066 (112 pages)
- Type 1077-2 (33 pages)
- Type 1094 (41 pages)
- Type 1094 (82 pages)
- Type 1094 (126 pages)
- Type 1094 (12 pages)
- Type 1115 (25 pages)
- Type 1150 (99 pages)
- Type 1541 (2 pages)
- Type 5142 (6 pages)
- Type 8619 (40 pages)
- Type 8619 (134 pages)
- Type 8620 (177 pages)
- Type 8622 (4 pages)
- Type 8623 (130 pages)
- Type 8623 (90 pages)
- Type 8625 (118 pages)
- Type 8624 (124 pages)
- Type 8718 (4 pages)