Positioner 1067 appendix, T + y = kp (xd + ƒ xd dt + tv ) dy dt 1 tn d xd dt – Burkert Type 1067 User Manual
Page 94
E-42-
POSITIONER 1067
APPENDIX
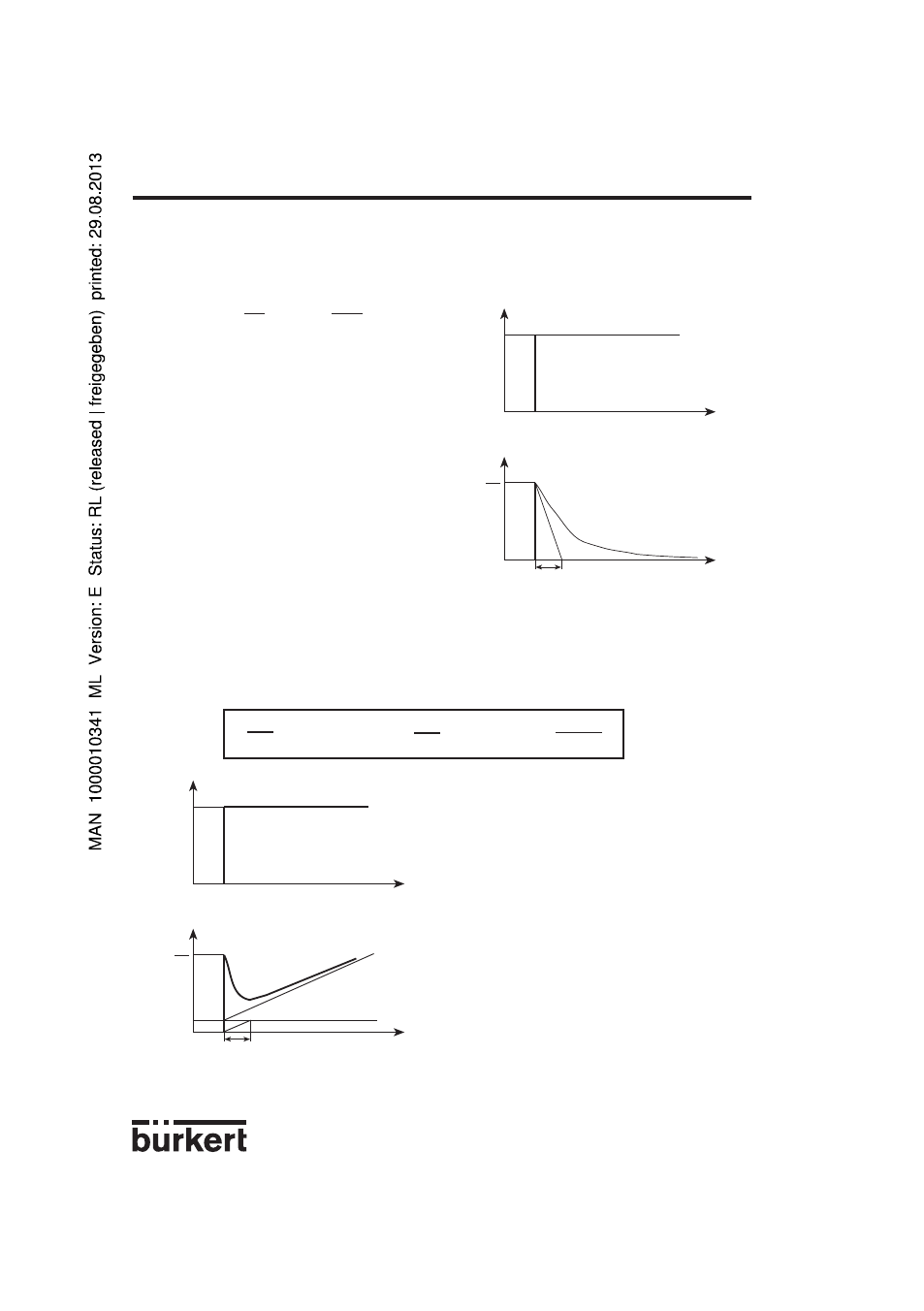
Realised PID controller
D component with delay :
In the 1067 positioner, the D component is realised with a delay T.
Function :
T + Y = Kd
Step
response
Supperposition of P-, I- and DT components :
Function of the real PID controller :
T + Y = Kp (Xd + ƒ Xd dt + Tv )
dY
dt
1
Tn
d Xd
dt
Step response of the real PID controller
Kp Xd
X
Xd
Y
Kp
T
t
t
Tn
Tv
X
Xd
Y
Kd
T
t
t
T
dY
dt
dXd
dt
See also other documents in the category Burkert Sensors:
- Type 1062 (112 pages)
- Type 8750 (82 pages)
- Type 1050 (4 pages)
- Type 8750 (64 pages)
- Type 8681 (40 pages)
- Type 8681 (90 pages)
- Type 8798 (106 pages)
- Type 8798 (2 pages)
- Type 8791 (4 pages)
- Type 8792 (252 pages)
- Type 8718 (34 pages)
- Type 8792 (118 pages)
- Type 8791 (15 pages)
- Type 8792 (136 pages)
- Type 8791 (184 pages)
- Type 8791 (28 pages)
- Type 8791 (21 pages)
- Type 8791 (154 pages)
- Type 8791 (106 pages)
- Type 0911 (76 pages)
- Type 0911 (46 pages)
- Type 0911 (64 pages)
- Type 0911 (84 pages)
- Type 1058 (31 pages)
- Type 1060 (4 pages)
- Type 1066 (112 pages)
- Type 1077-2 (33 pages)
- Type 1094 (12 pages)
- Type 1094 (41 pages)
- Type 1094 (82 pages)
- Type 1094 (126 pages)
- Type 1115 (25 pages)
- Type 1150 (99 pages)
- Type 1541 (2 pages)
- Type 5142 (6 pages)
- Type 8619 (40 pages)
- Type 8619 (134 pages)
- Type 8620 (177 pages)
- Type 8622 (4 pages)
- Type 8623 (130 pages)
- Type 8623 (90 pages)
- Type 8625 (118 pages)
- Type 8624 (124 pages)
- Type 8718 (254 pages)