Positionneur 1067, Annexes – Burkert Type 1067 User Manual
Page 143
F-41-
POSITIONNEUR 1067
t
t
X
Y
Xd
}
}
Tn
Combinaison des parts P, I et D :
Y = Kp Xd + ƒ Xd dt + Kd
Avec Kp•Ti = Tn et = Tv, on obtient pour la fonction du régulateur PID :
Y = Kp (Xd + ƒ Xd dt + Tv )
Kp :
Coefficient d’action proportionnelle / facteur de gain
Tn :
Temps de compensation (temps nécessaire pour obtenir par la part I une modification de la
variable réglante identique à celle obtenue avec la part P).
Tv :
Temps d’action dérivée (temps à raison duquel une variable réglante donnée est atteinte plus
rapidement avec la part D qu’avec un régulateur purement P).
ANNEXES
1
Ti
d Xd
dt
Kd
Kp
1
Tn
d Xd
dt
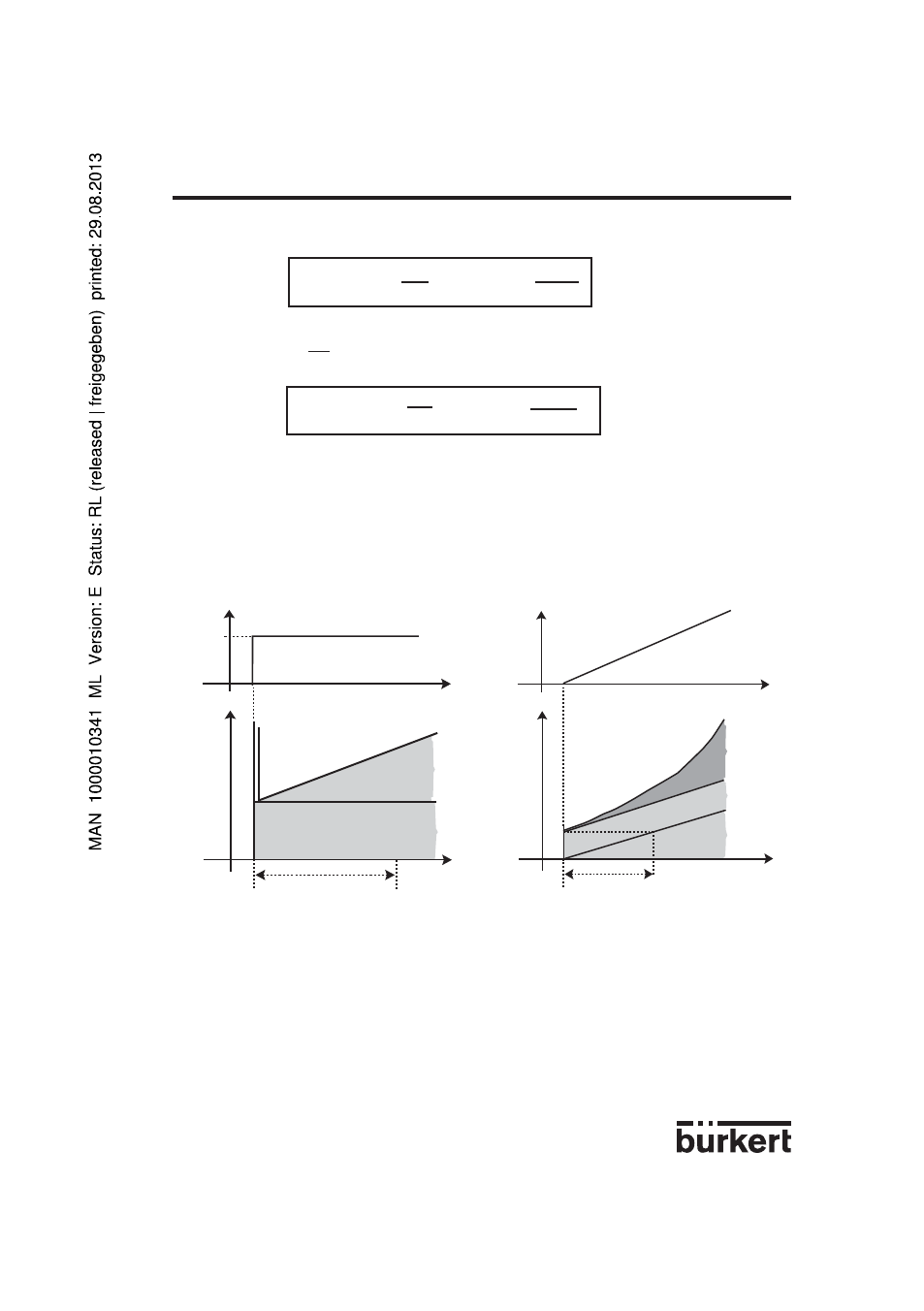
Réponse à un échelon
Réponse à une rampe
du régulateur PID
du régulateur PID
Part D
Part I
Part P
Temps de compensation
t
t
X
Y
}
}
}
Tv
Part D
Part I
Part P
Temps d'action dérivée
- Type 1062 (112 pages)
- Type 1050 (4 pages)
- Type 8750 (64 pages)
- Type 8750 (82 pages)
- Type 8681 (40 pages)
- Type 8681 (90 pages)
- Type 8798 (2 pages)
- Type 8791 (4 pages)
- Type 8798 (106 pages)
- Type 8718 (34 pages)
- Type 8792 (118 pages)
- Type 8791 (15 pages)
- Type 8792 (136 pages)
- Type 8792 (252 pages)
- Type 8791 (21 pages)
- Type 8791 (154 pages)
- Type 8791 (106 pages)
- Type 8791 (184 pages)
- Type 8791 (28 pages)
- Type 0911 (76 pages)
- Type 0911 (46 pages)
- Type 0911 (64 pages)
- Type 0911 (84 pages)
- Type 1058 (31 pages)
- Type 1060 (4 pages)
- Type 1066 (112 pages)
- Type 1077-2 (33 pages)
- Type 1094 (12 pages)
- Type 1094 (41 pages)
- Type 1094 (82 pages)
- Type 1094 (126 pages)
- Type 1115 (25 pages)
- Type 1150 (99 pages)
- Type 1541 (2 pages)
- Type 5142 (6 pages)
- Type 8619 (40 pages)
- Type 8619 (134 pages)
- Type 8620 (177 pages)
- Type 8622 (4 pages)
- Type 8623 (130 pages)
- Type 8623 (90 pages)
- Type 8625 (118 pages)
- Type 8624 (124 pages)
- Type 8718 (254 pages)