2 ) format – Yaskawa MP900 Series Ladder Programming Manual User Manual
Page 247
5.8 DDC Instructions
5.8.11 Linear Accelerator/Decelerator 1 (LAU)
5-178
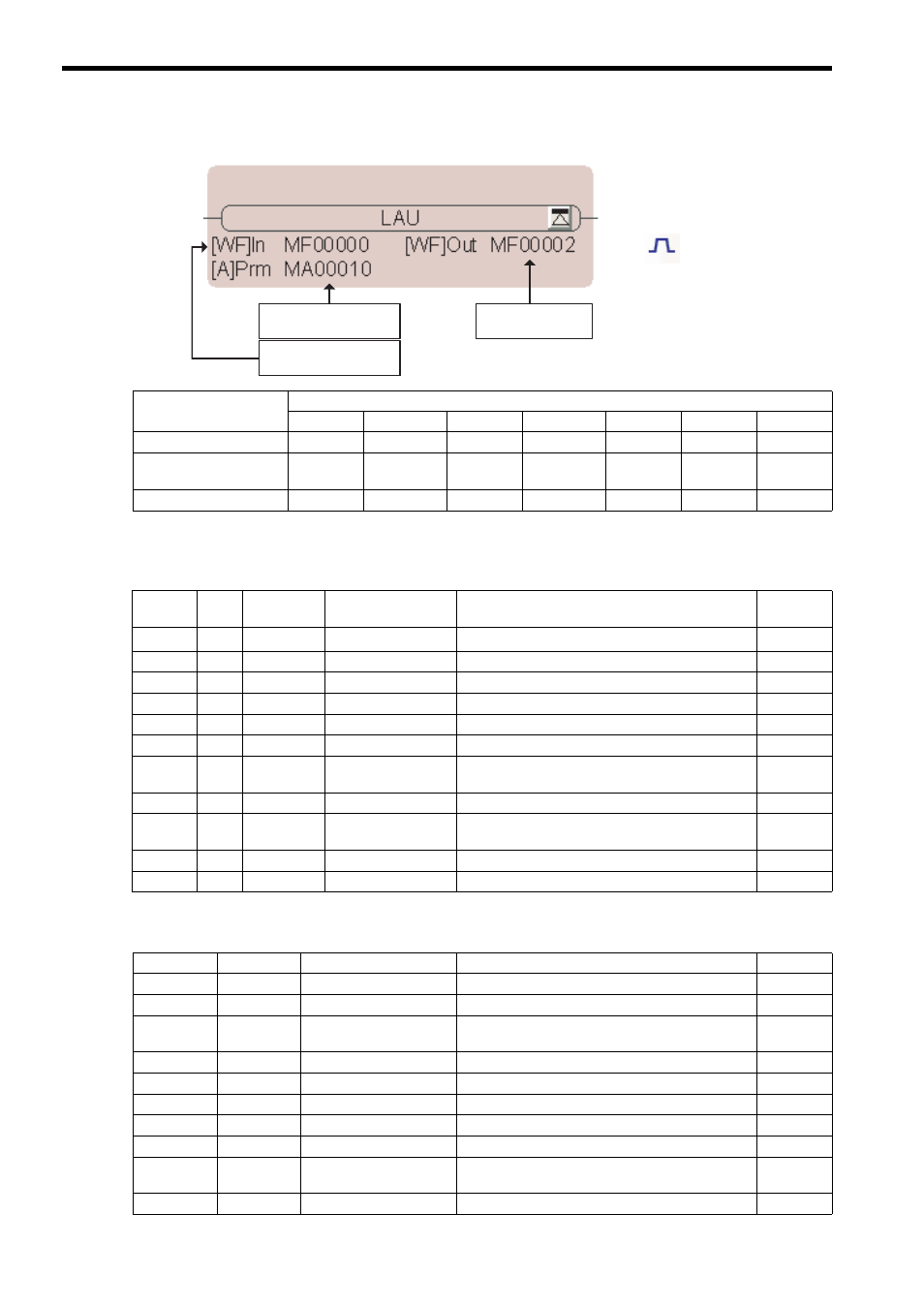
( 2 ) Format
∗ C and # registers cannot be used.
[ a ] Parameter Table Configuration for LAU Instruction with Integers
∗ The relay input and output bits are assigned as given below. (Close = Bit change to 1 (ON), Open = Bit change to 0
(OFF))
If QS (quick stop) is opened, QT (quick stop time) is used as the acceleration/deceleration time.
Parameter Name
Applicable Data Types
B
W
L
F
A
Index
Constant
Input speed (In)
×
{
×
{
×
{
{
First address of
parameter table (Prm)
×
×
×
×
{
×
×
Output speed (Out)
×
{
*
×
{
*
×
{
×
First address of
parameter table
Output speed
Input speed
Icon:
Key entry: LAU
Address
Data
Type
Symbol
Name
Specification
I/O
0
W
RLY
Relay I/O
Relay inputs and relay outputs
*
IN/OUT
1
W
LV
100% level of input
Scale for 100% input
IN
2
W
AT
Acceleration time
Time to accelerate from 0% to 100% (0.1 s)
IN
3
W
BT
Deceleration time
Time to decelerate from 100% to 0% (0.1 s)
IN
4
W
QT
Quick stop time
Time to make a quick stop from 100% to 0% (0.1 s)
IN
5
W
V
Current speed
LAU output (output to Out)
OUT
6
W
DVDT
Current acceleration/
deceleration rate
Scaling with the normal acceleration rate set to 5,000
OUT
7
W
–
(Reserved.)
Spare register
–
8
W
VIM
Previous speed refer-
ence
For storage of the previous speed reference input
value
OUT
9
W
DVDTK
DVDT coefficient
Scaling factor for DVDT (Current Acceleration Rate)
IN
10
L
REM
Remainder
Remainder of the acceleration/deceleration rate
OUT
Bit
Symbol
Name
Specification
I/O
0
RN
Line running
This input is closed to run the line.
IN
1
QS
Quick stop
This input is opened to execute a quick stop.
IN
2
DVDTF
Skip execution of DVDT
operation
This input is closed to skip execution of the DVDT
operation.
IN
3
DVDTS
DVDT operation selection
Selects the method for calculating DVDT
IN
4 to 7
–
(Reserved.)
Spare input relays
IN
8
ARY
Accelerating
This output is closed during acceleration.
OUT
9
BRY
Decelerating
This output is closed during deceleration.
OUT
A
LSP
Zero speed
This output is closed during zero speed.
OUT
B
EQU
Equal
This output is closed when the input speed equals the
output speed.
OUT
C to F
–
(Reserved.)
Spare output relays
OUT