2 ) format – Yaskawa MP900 Series Ladder Programming Manual User Manual
Page 215
5.8 DDC Instructions
5.8.4 PI Control (PI)
5-146
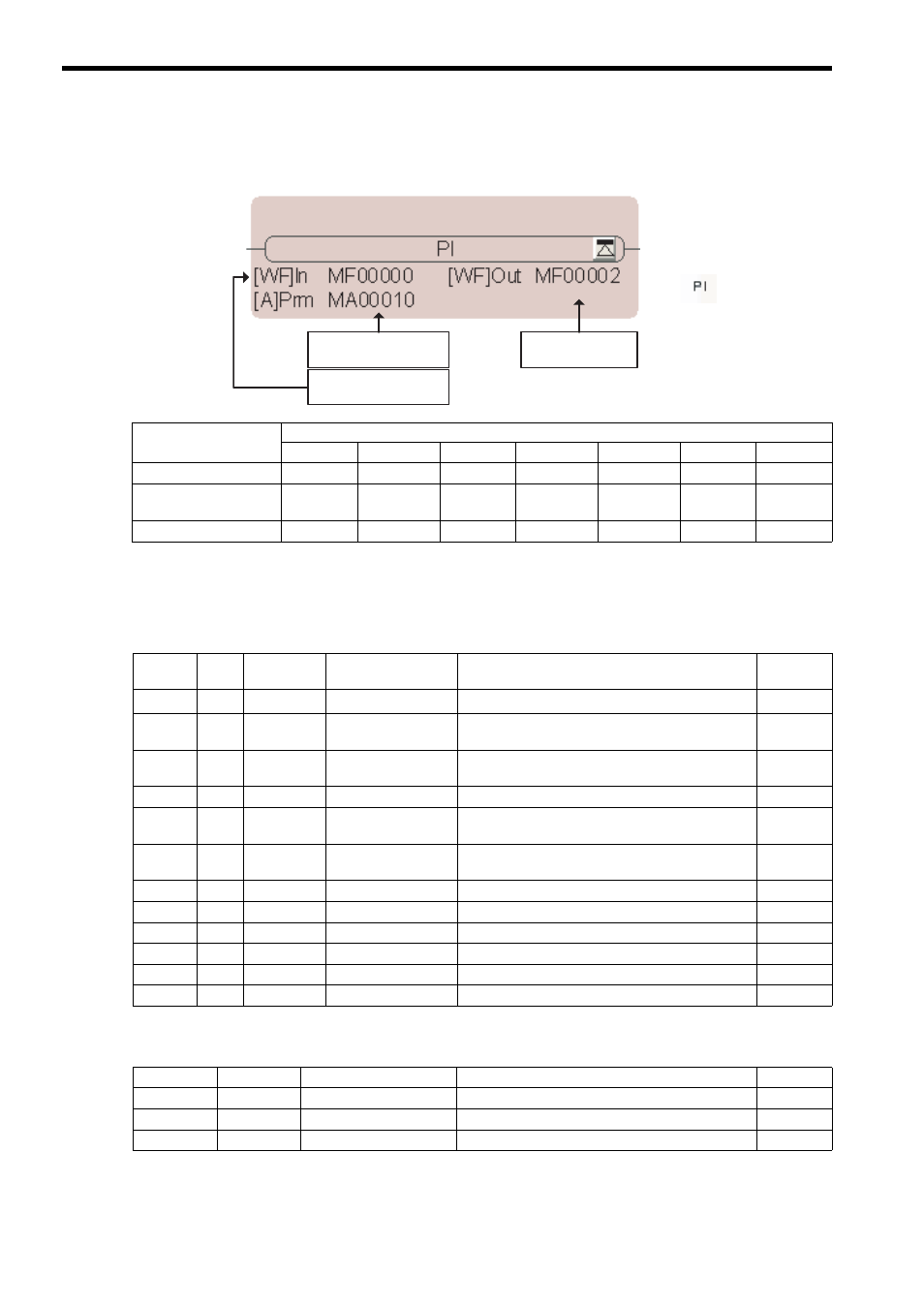
( 2 ) Format
∗ C and # registers cannot be used.
[ a ] Parameter Table Configuration for PI Instruction with Integers
∗ The relay input and output bits are assigned as given below. (Close = Bit change to 1 (ON), Open = Bit change to 0
(OFF))
Parameter Name
Applicable Data Types
B
W
L
F
A
Index
Constant
Input value (In)
×
{
×
{
×
{
{
First address of
parameter table (Prm)
×
×
×
×
{
*
{
{
Output value (Out)
×
{
*
×
{
*
×
{
×
First address of
parameter table
Output value
Input value
Icon:
Key entry: PI
Address
Data
Type
Symbol
Name
Specification
I/O
0
W
RLY
Relay I/O
Relay inputs and relay outputs
*
IN/OUT
1
W
Kp
P gain
Gain for the P compensation
(A gain of 1 is equivalent to 100.)
IN
2
W
Ki
Integral adjustment
gain
Gain for the input to the integration circuit
(A gain of 1 is equivalent to 100.)
IN
3
W
Ti
Integral time
Integral time (ms)
IN
4
W
IUL
Upper integration
limit
Upper limit for the I compensation
IN
5
W
ILL
Lower integration
limit
Lower limit for the I compensation
IN
6
W
UL
PI upper limit
Upper limit for the P + I compensation
IN
7
W
LL
PI lower limit
Lower limit for the P + I compensation
IN
8
W
DB
PI output dead zone
Dead zone width for the P + I compensation
IN
9
W
Y
PI output
PI compensation output (output to Out)
OUT
10
W
Yi
I compensation
I compensation storage
OUT
11
W
IREM
I remainder
I remainder storage
OUT
Bit
Symbol
Name
Specification
I/O
0
IRST
Reset integration bit
This input is closed to reset the integration operation.
IN
1 to 7
–
(Reserved.)
Spare input relays
IN
8 to F
–
(Reserved.)
Spare output relays
OUT