6 pid control (pid), 1 ) operation – Yaskawa MP900 Series Ladder Programming Manual User Manual
Page 225
5.8 DDC Instructions
5.8.6 PID Control (PID)
5-156
5.8.6 PID Control (PID)
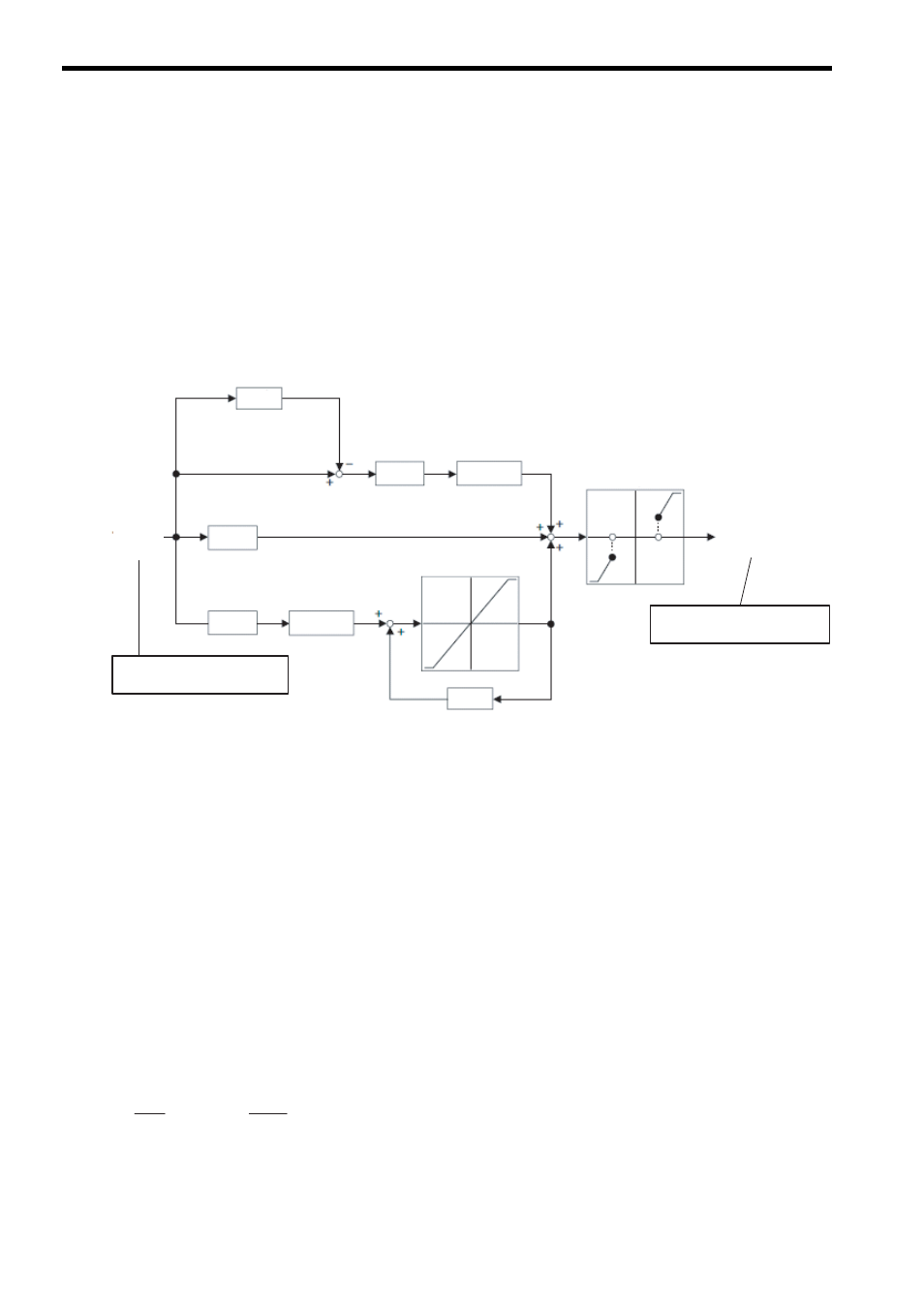
( 1 ) Operation
When deviation X is input, the PID instruction performs P, I, and D operations and a range operation based on pre-
defined parameters in a parameter table, and outputs the result as compensation Y.
When the reset integration bit in the parameter table is closed (turned ON), the PI compensation is calculated using an
I compensation value of 0.
The input value to the PID instruction can be an integer or a real number. Double-length integers cannot be used.
The structure of the parameter table is different for integers and real numbers.
∗ 1. If the P + I + D compensation crosses the UL or LL (PID upper or lower limit), or DB (PI dead zone),
the following processing is performed,
If the P compensation and I compensation have the same sign (divergence)
→ The previous value is
retained for the I compensation value.
If the P compensation and I compensation have different signs (convergence to 0)
→ The I compensation
value is updated to a new value.
∗ 2. The differential time (Td) changes based on the relationship between the change in the deviation input
(X – X') and the previous deviation input (X') as follows:
If the change in the deviation input (X – X’) and the previous deviation input (X’) have the same sign
(divergence)
→ Td = Td1 (differential time for divergence)
If the change in the deviation input (X – X’) and the previous deviation input (X’) have different signs (con-
vergence)
→ Td = Td2 (differential time for convergence)
The operation of the PID instruction can be expressed by the following formula, where X (s) is the input value and Y
(s) is the output value.
= Kp + Ki
×
+
Kd
× Td × S
Deviation X
Compensation Y
(PID output)
P compensation
I compensation Yi
Previous I compensation
Yi'
PID Compensation Value Range Operation*
1
(Upper/Lower Limit + Dead Zone A)
RCHK
RCHK
+ DZA
Input value for PID instruction
Output value for PID instruction
Upper/lower limit for
I compensation
D compensation
Previous input value
X'
Differential (D) operation*
2
Kp: P (proportional) gain
Ki: I (integral) gain
Kd: D (differential) gain
Ts: Scan time
Td: Differential time
Ti: Integral time
Ki
Kp
Kd
Td/Ts
Ts/Ti
Y(s)
X(s)
1
Ti
× s