3 achievable safety level, 1 permitted encoder types and output signals, 2 requirements of the drive controller – Pilz PNOZ s30 24-240VACDC 2 n/o 2 n/c User Manual
Page 76
Supplementary data
Operating Manual PNOZ s30
1001715-EN-13
76
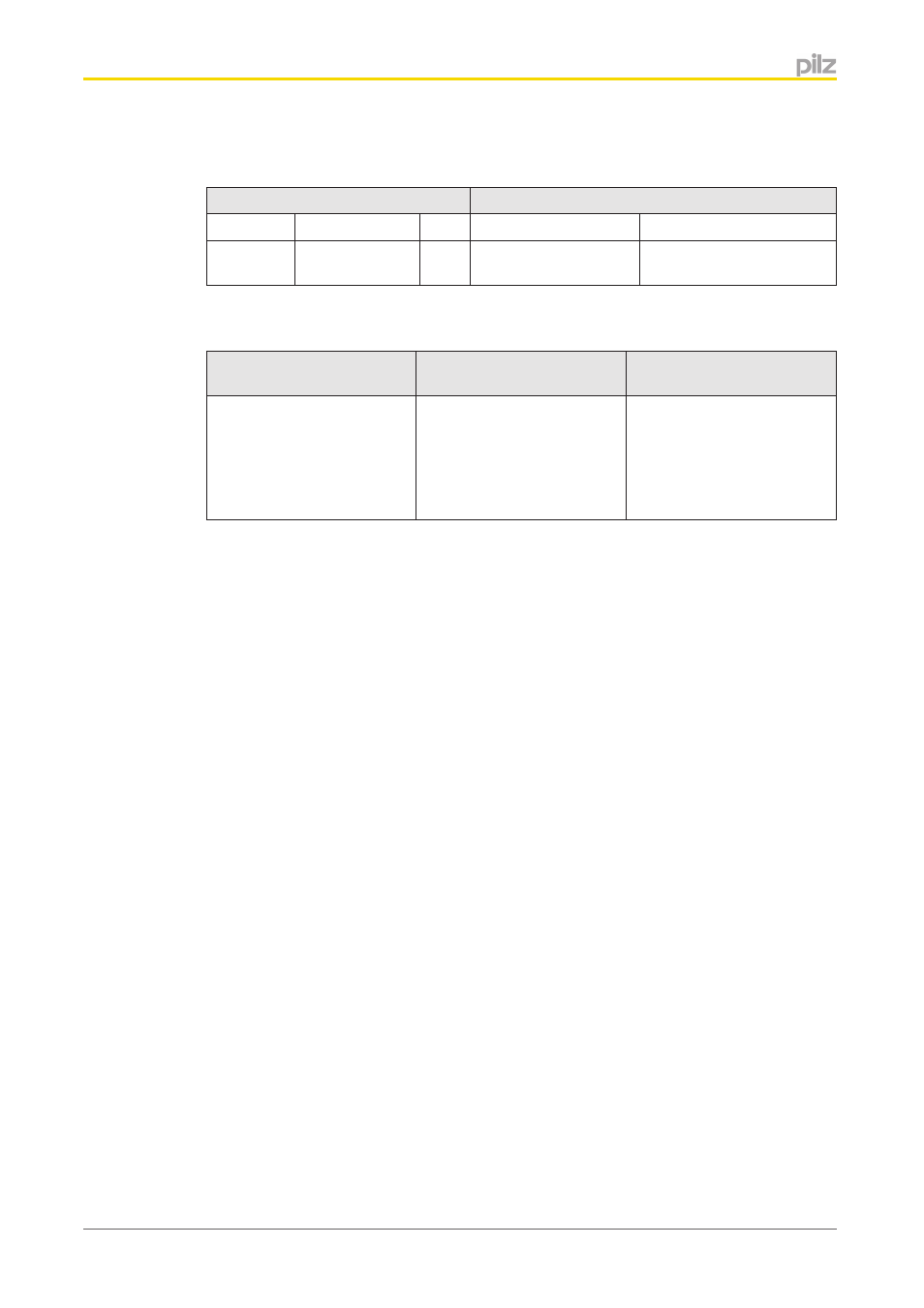
To calculate the safety function you will need the following data for the "sensor" subsystem
and "PNOZ s30" subsystem:
Sensor
PNOZ s30 subsystem
Category MTTFd
DC
Operating mode
PFH (1/h)
2
Manufactur-
er-specific
90 % Monitoring
1 encoder
2,34E-08
Achievable safety level
Safety function
PL in accordance with EN
ISO 13849-1: 2006
SIL CL in accordance with
EN IEC 62061
Speed
Speed range
Direction
Standstill
Position
PL d (Cat. 2)
2
Safety-related characteristic data for operation with non-safety-related
rotary encoder with diagnostics via the drive controller
The detection of encoder errors (diagnostics for the sensor subsystem via the evaluation
device) can be supplemented with a drive controller.
Permitted encoder types and output signals
Permitted encoder types:
}
Rotary non-safety-related encoders
}
Linear non-safety-related encoders
Permitted output signals:
}
Square output signals TTL, single ended
}
Square output signals TTL, differential
}
Square output signals HTL, single ended
}
Square output signals HTL, differential
}
Sin/Cos output signals 1Vss, reference voltage
}
Sin/Cos output signals 1Vss, differential
Requirements of the drive controller
}
Parameters for the control loops and motor control must be set in such a way as to
guarantee stabile operation.
Drag error detection (see below) must be capable of operating in accordance with the
requirements of the safety function.
}
The motor must be operated with a current impressing control procedure, based on the
rotor position (field-oriented control). If the analogue track signals are idle, field-oriented
control will brake and/or stop the rotor.
}
The drive controller must be in position control operating mode.
9.2.4.3
9.2.5
9.2.5.1
9.2.5.2