Safe torque-off configurations, Hardwired safety configuration, Dded safe torque-off configurations – Rockwell Automation 2198-Hxxx Kinetix 5500 Servo Drives User Manual User Manual
Page 23
Rockwell Automation Publication 2198-UM001D-EN-P - May 2014
23
Start
Chapter 1
Safe Torque-off
Configurations
Kinetix 5500 servo drives are available with safe torque-off via hardwired
connections or integrated over the EtherNet/IP network. These examples
illustrate the safe torque-off configuration options.
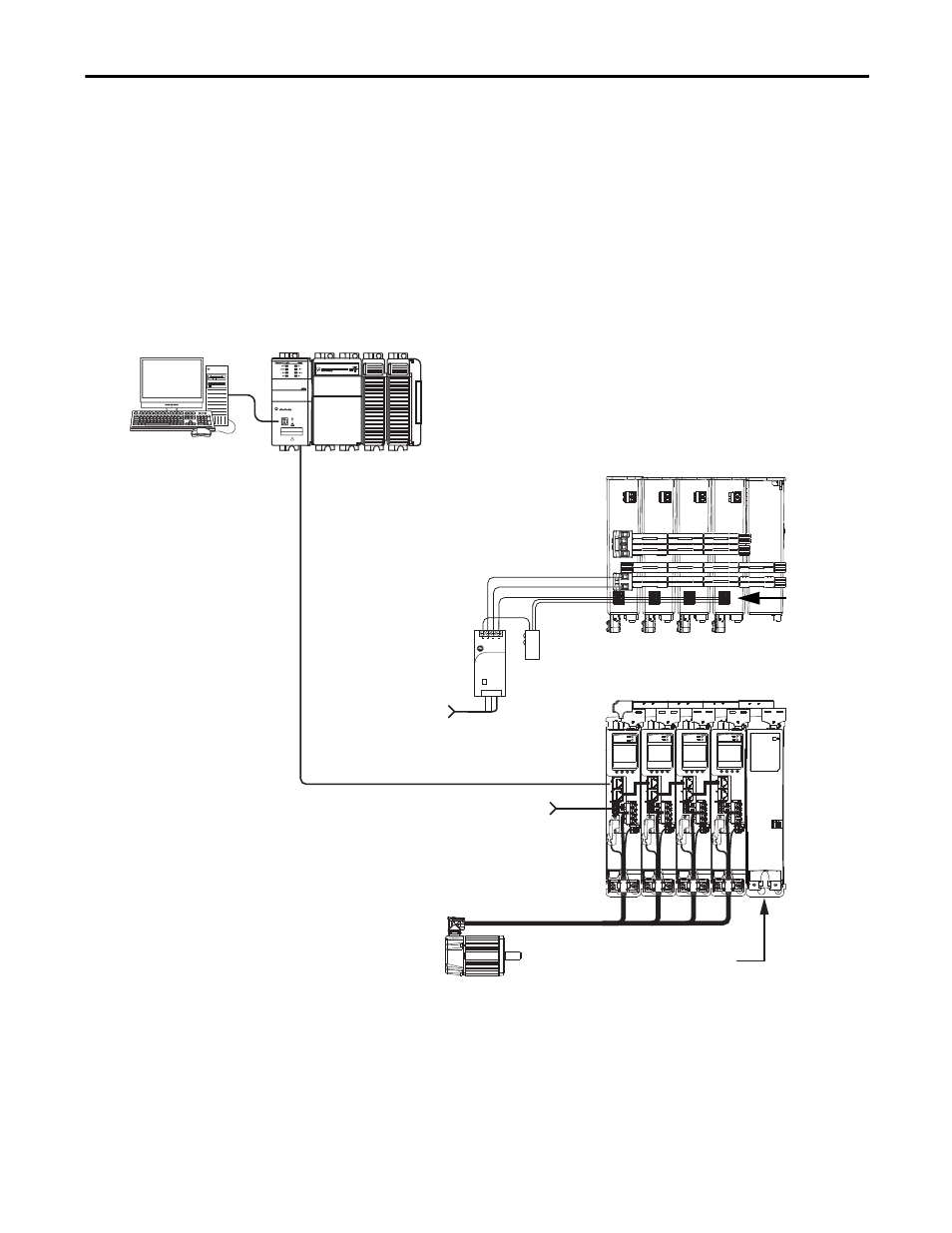
Hardwired Safety Configuration
The 2198-H
xxx-ERS drives use the safe torque-off (STO) connector for
cascading hardwired safety connections from drive-to-drive.
Figure 9 - Safe Torque-off (hardwired) Configuration
1 (Front)
2 (Rear)
00:00:BC:2E:69:F6
1606-XL
Po we r S u p p l y
Input
Allen-Bradley
1585J-M8CBJM-x
Ethernet (shielded) Cable
CompactLogix 5370 Controller,
ControlLogix 1756-L7x Controller, or
GuardLogix 1756-L7xS Safety Controller
(CompactLogix controller is shown)
Logix Designer
Application
(version 21.0 or later)
AC Input Power
Safety
Device
2198-Hxxx-ERS Servo Drives
(top view)
2198-Hxxx-ERS Servo Drives
(front view)
Digital Inputs to Sensors and Control String
1606-XLxxx
24V DC Control, Digital Inputs,
and Motor Brake Power
(customer-supplied)
Kinetix VP
Servo Motors
2198-CAPMOD-1300 Capacitor Module
(optional component)
Module Definition
Configured with
Motion-only
Connection
Safe Torque-off
(STO) Connectors