Typical hardware configurations, Standalone configurations – Rockwell Automation 2198-Hxxx Kinetix 5500 Servo Drives User Manual User Manual
Page 15
Rockwell Automation Publication 2198-UM001D-EN-P - May 2014
15
Start
Chapter 1
Typical Hardware
Configurations
Typical Kinetix 5500 systems include single-phase and three-phase standalone
configurations, three-phase shared AC, shared AC/DC, shared DC, and shared
AC/DC hybrid configurations.
Standalone Configurations
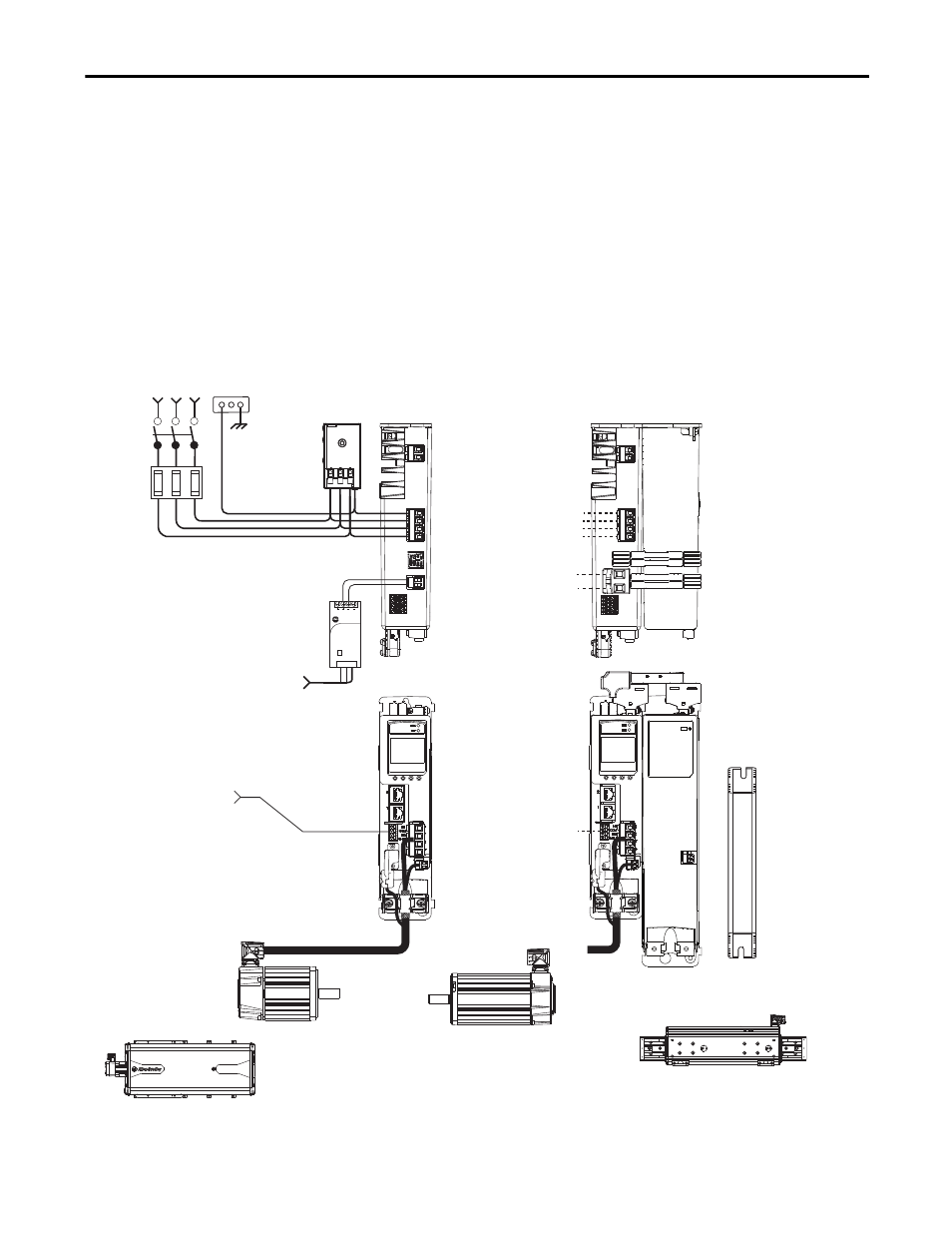
In these examples, a single standalone drive is shown with and without the
Bulletin 2198 capacitor module.
Figure 1 - Typical Kinetix 5500 Standalone Installation
(1) Requires the 2198-H2DCK Hiperface-to-DSL feedback converter kit. LDAT-Series linear thrusters and MP-Series (200V-class) motors
and actuators require the 2198-H2DCK (series B or later) converter kit.
1606-XL
Po we r S u p p l y
Input
Allen-Bradley
Single-phase or
Three-phase
Input Power
Bulletin 2090
Single Motor Cable
Line
Disconnect
Device
Input
Fusing
2198-Hxxx-ERSx Drive
(front view)
2097-Rx
Shunt Resistor
(optional component)
Kinetix VP (Bulletin VPL, VPF,
and VPS) Rotary Motors
(VPL-Bxxxx motor is shown)
2198-Hxxx-ERSx Drive
(top view)
AC Input Power
Bonded Cabinet
Ground Bus
2198-KITCON-DSL (shown)
Motor Feedback Connector Kit
or 2198-H2DCK Hiperface-to-DSL
Feedback Converter Kit
Mains AC and 24V input
wired to standard input
connectors.
2198-DBxx-F
AC Line Filter
(required for CE)
Shared DC (DC common bus)
Shared 24V (control power input)
2198-Hxxx-ERSx Drive (top view)
with 2198-CAPMOD-1300
Capacitor Module
2198-H0x0-x-x shared-bus
connection system for bus-
sharing configurations.
Mains AC input wired to
standard input connector.
Digital Inputs
to Sensors and Control String
1606-XLxxx
24V DC Control, Digital Inputs,
and Motor Brake Power
(customer-supplied)
MP-Series (Bulletin MPAS, MPAR, MPAI) Linear Actuators
(1)
MPAS-B9xxx (ballscrew) Linear Stage is Shown
MP-Series (Bulletin MPL, MPM, MPF, MPS) Rotary Motors
(1)
(MPL-Bxxxx rotary motor is shown)
LDAT-Series Linear Thrusters
(1)
(LDAT-Sxxxxxx-xDx linear thruster is shown)