Appendix – Lenze ECSCSxxx User Manual
Page 448
Appendix
Communication with MotionBus/system bus (CAN)
Process data transfer
l
448
EDBCSXS064 EN 4.0
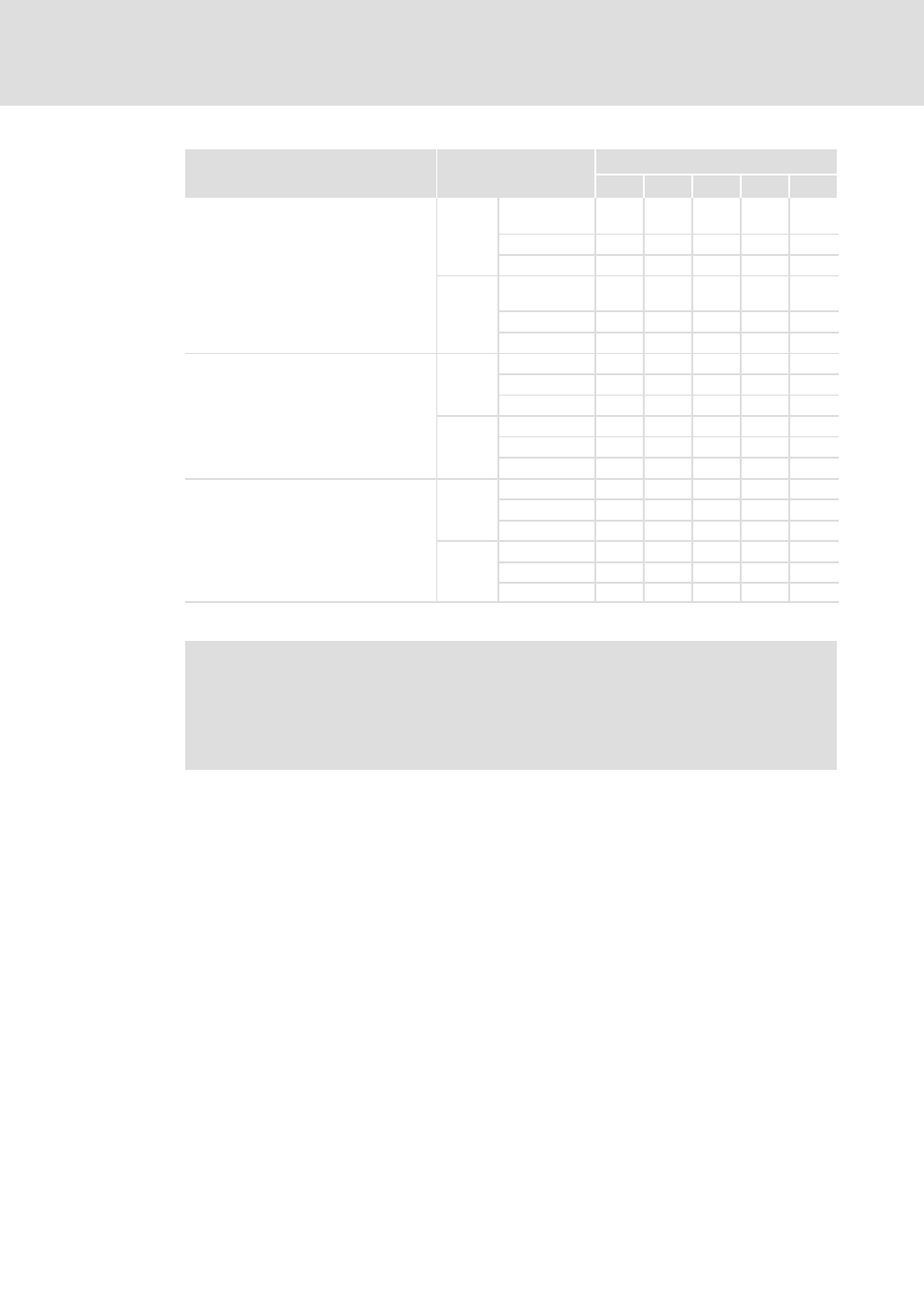
Interface
PDOs
RPDO: to ECS module
TPDO: from ECS module
Availability in ECS modules
ECSxE
ECSxS
ECSxP
ECSxM ECSxA
X1
Automation interface (AIF)
RPDO
AIF1_IN
˘
ü
V3.0 or
higher
V3.0 or
higher
ü
AIF2_IN
˘
ь
˘
˘
ь
AIF3_IN
˘
ь
˘
˘
ь
TPDO
AIF1_OUT
˘
ü
V3.0 or
higher
V3.0 or
higher
ü
AIF2_OUT
˘
ь
˘
˘
ь
AIF3_OUT
˘
ь
˘
˘
ь
X4
ECSxS/P/M: MotionBus (CAN)
ECSxA/E: System bus (CAN)
RPDO
CAN1_IN
ь
ь
ь
ь
ь
CAN2_IN
˘
ь
ь
˘
ь
CAN3_IN
ь
ь
ь
˘
ь
TPDO
CAN1_OUT
ь
ь
ь
ь
ь
CAN2_OUT
ь
1)
ь
ь
˘
ь
CAN3_OUT
ь
ь
ь
˘
ь
X14
System bus (CAN)
Interface is not available for ECSxE.
RPDO
CANaux1_IN
˘
˘
ь
˘
ь
CANaux2_IN
˘
˘
ь
˘
ь
CANaux3_IN
˘
˘
˘
˘
ü
TPDO
CANaux1_OUT
˘
˘
ь
˘
ь
CANaux2_OUT
˘
˘
ь
˘
ь
CANaux3_OUT
˘
˘
˘
˘
ü
1) ECSxE from V5.0: CAN2_OUT (Diagnostic PDO)
)
Note!
Power supply module ECSxE
In case of the ECSxE power supply module, the PDOs CAN1_IN/OUT and
CAN3_IN/OUT cannot be used simultaneously. The PDOs to be used are
selected via C0360.
ƒ
The process data objects are integrated into the ECSxS... axis modules in the form of
function blocks (
^ 247).
ƒ
In the function blocks the user data is converted to corresponding signal types for
further use.
13.4.3.2
Structure of the process data
The process data telegrams have a maximum user data length of eight bytes each.
Process data input telegram (RPDO)
ƒ
The process data input telegram transmits control information to the controller.
ƒ
The control word is transmitted in byte 1 and 2 of the user data.